Project/KUSMO
[KUSMO] 8/16 ~10/7
YoungSeong98
2022. 10. 7. 01:23
728x90
반응형
- 8월



- 학교 근처 식당에서 SLAM, Navigation 구현
- 기능 구현 후 목표 스펙에 맞는 부품들 선정
- 목표 스펙
- 총 하중 : 100kg
- 속도 : 0.6m/s
- 2개의 구동 바퀴 + 4개의 케스터 휠



- 세종시 근처 서빙로봇들의 동작, 구조 관찰
- 9월

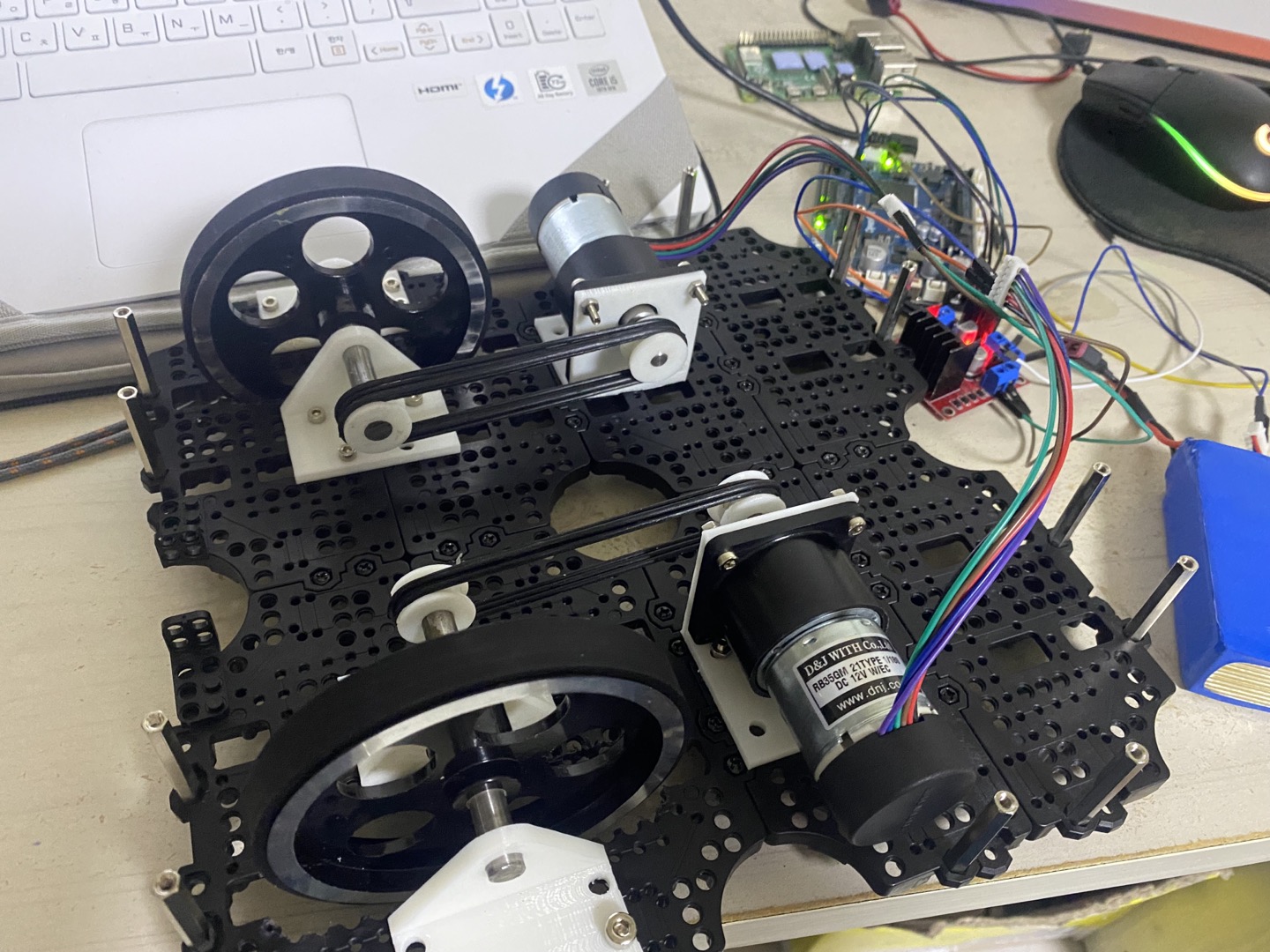
- 터틀봇 개조 후 구동 테스트 진행
- 링의 장력이 약해 모터가 제대로 돌아가지 않음
- 모터 동작 외에도 터틀봇을 개조하는 방향으로는 목표 하중을 견딜 수 없을것이라 판단되어 로봇 자체 제작 결정
- 목표 중량은 50kg으로 낮춤
- 교내 창업동아리 선정
- 10월

- 로봇 설계 진행


- 구동부 설계와 동일한 나무판자 사용을 통해 설계 검증
- 구동부 구성 후 주행 테스트 진행
728x90
반응형