728x90
반응형
Ch5 ROS 명령어
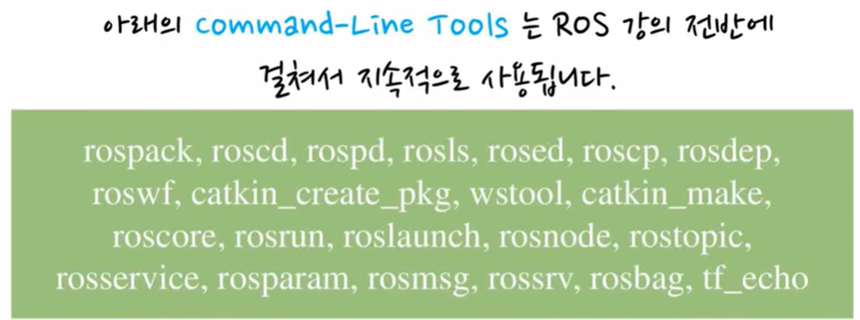

- roscd에서 cd는 원래 Linux에서 사용하는 명령어

- roscore는 위 3가지 기능을 다 수행함
- roscore는 한번 사용 후 끄지 않는 한 계속 사용. Master는 하나임
- roslaunch는 rosrun과 달리 복수의 node들을 한번에 실행시킬 수 있음


- catkin은 ROS 코드를 빌드하고 구성할 때 사용하는 build system으로써, catkin 명령어를 통해 build를 하거나 의존성 관계 확인
- catkin workspace는 기본적으로 ~/catkin_ws 경로에 구축됨
- workspace란 원하는 작업 수행을 위한 코드를 작성하는 directory로써, 한번에 하나의 workspace에서만 작업할 수 있다

- http://wiki.ros.org/Tools#Command_Line_Tools : ROS의 여러 tools에 대한 정보 확인 가능
- ROS 용어 정리
- ROS(Robot Operating System) : 로봇 응용프로그램을 개발하기 위한 OS와 같은 Robot Software Platform으로, 로봇 응용프로그램 개발에 필요한 각종 library와 다양한 개발 및 Dubugging 도구를 제공한다
- Node : ROS에서 최소 단위의 실행 processor를 가리키는 용어
- Master : Node 간의 연결과 message 통신을 위한 name server와 같은 역할을 한다. roscore로 실행시킬 수 있다
- Package : ROS를 구성하는 기본 단위로, 최소 하나 이상의 실행 가능한 node를 포함한다. ROS의 응용 프로그램은 package 단위로 개발된다
- Metapackage : 공통된 목적을 지닌 package들의 집합
728x90
반응형
'Study_ROS > [ROBOTIS ROS Courses]' 카테고리의 다른 글
| [ROBOTIS ROS Courses] Ch8. 로봇, 센서, 모터 ~ Ch10. 모바일 로봇 (0) | 2023.01.24 |
|---|---|
| [ROBOTIS ROS Courses] Ch7. ROS 기본 프로그래밍 (0) | 2022.09.17 |
| [ROBOTIS ROS Courses] Ch6. ROS 도구(RViz, rqt, Gazebo) (0) | 2022.09.17 |
| [ROBOTIS ROS Courses] Ch3. ROS 개발환경 구축 ~ Ch4. ROS의 중요 컨셉 (0) | 2022.09.10 |
| [ROBOTIS ROS Courses] Ch1. 로봇 소프트웨어 플렛폼 ~ Ch2. 로봇 운영체제 ROS (0) | 2022.08.30 |



