- KUSMO 소개
- 5월 중순경에 실내 자율주행 로봇을 개발하고자 결성된 팀
- SW개발 2명, HW개발 2명 총 4명으로 구성
- KUSMO는 Korea UniverSity Mobility의 약자로, 고려대학교 학생들끼리 모빌리티 로봇을 개발함을 의미
- 현재 세종테크노파크 주관 지역과학문화 역량강화사업 '세종 우리동네 과학클럽' 진행중 (~10/31)
- 터틀봇3 와플파이 조립 후 구동을 위한 준비
- ROS1 - Melodic이 참고 자료가 많아 가장 안정적인 ROS 버전이라고 판단하여 선택
1) Windows11 환경에서 듀얼부팅을 통한 Ubuntu 설치 후 실행
- https://releases.ubuntu.com/18.04.6/?_ga=2.92636125.1386886778.1658923929-2019212762.1658923929 에서 Ubuntu 18.04.6 LTS 설치

- ROS1 - Melodic 사용을 위한 Ubuntu 18.04 설치


- 위 설정 완료 후 '시작'을 통해 usb에 ubuntu 설치
- Window키 + R을 통해 실행창을 연 후 diskmgmt.msc 입력 후 실행





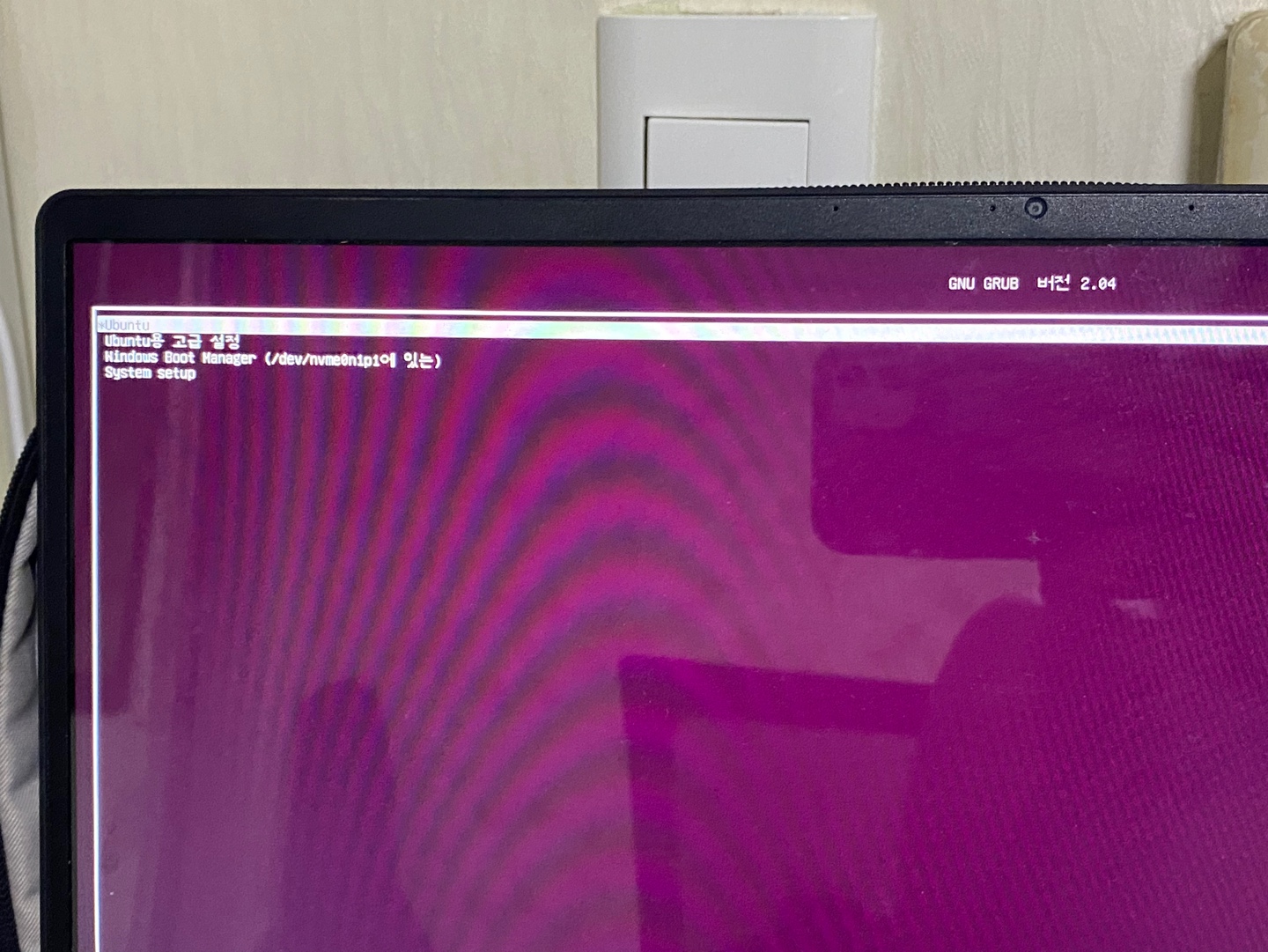
- 위 설정을 하지 않아 아래 사진과 같이 부팅 설정화면이 아닌 창으로 진입하는 오류 발생

- Ubuntu 초기 설정
-
wget https://raw.githubusercontent.com/orocapangyo/meetup/master/190830/install_ros_melodic.sh && chmod 755 ./install_ros_melodic.sh && bash ./install_ros_melodic.sh- 설정 완료 후 터미널에서 위 코드를 실행하여 ROS Melodic 설치
2) OpenCR 제어를 위한 Arduino 설치 후 설정
- 설치파일 압축 해제 후 별도의 폴더를 생성하여 설치파일 이동
sudo ./install.sh- 해당 폴더에서 터미널을 열고 위 코드를 실행시켜 인스톨 쉘 실행
- Arduino 실행 후 터틀봇3 패키지 설치
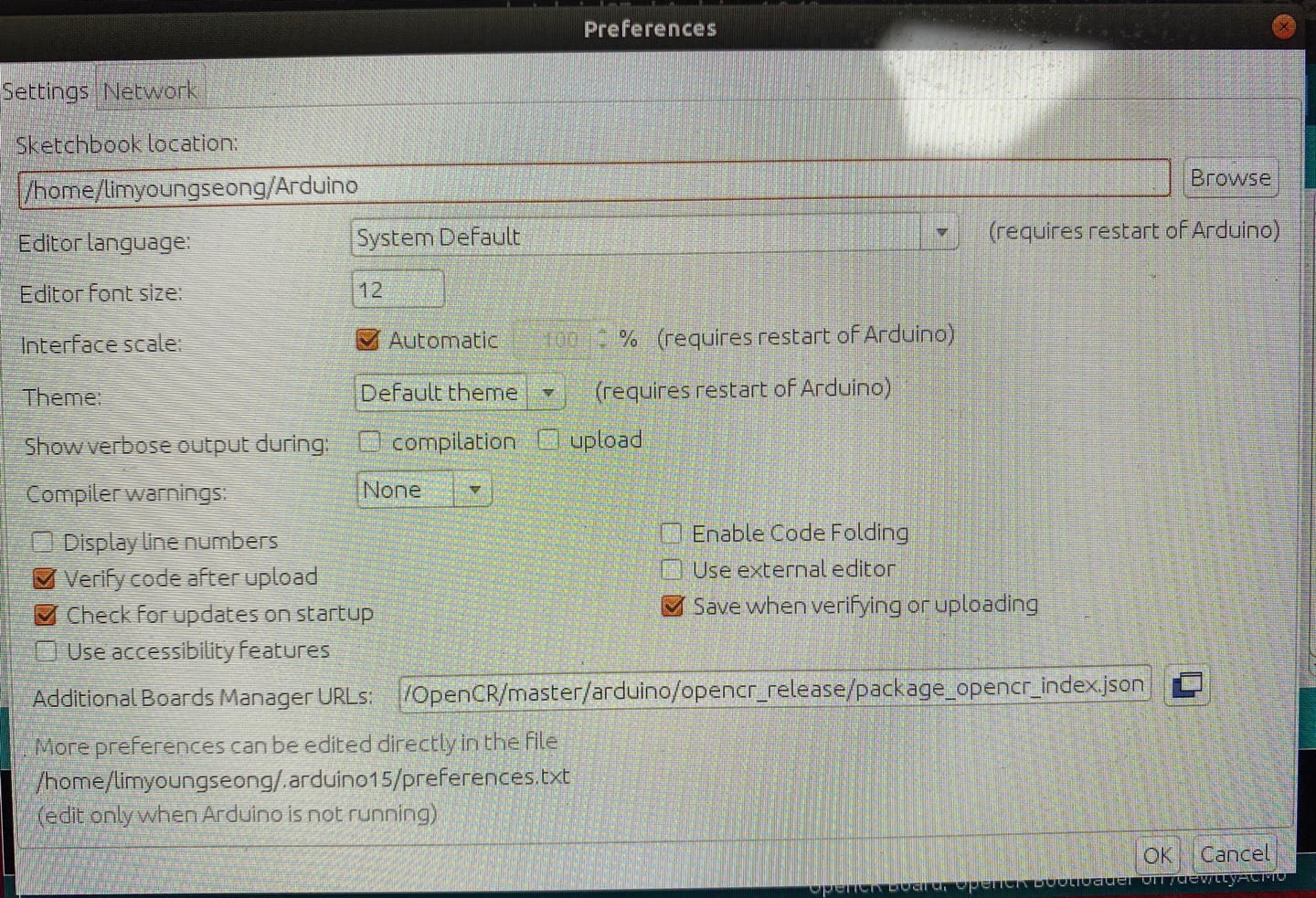
- File -> Preferences 선택 후 아래와 같이 check box 선택 후 'Additional Boards Manager URLs'에 아래 링크 입력
https://raw.githubusercontent.com/ROBOTIS-GIT/OpenCR/master/arduino/opencr_release/package_opencr_index.json
- Tools -> Board -> Boards Manager 선택
- 검색창에 'OpenCR by ROBOTIS' 선택 후 install
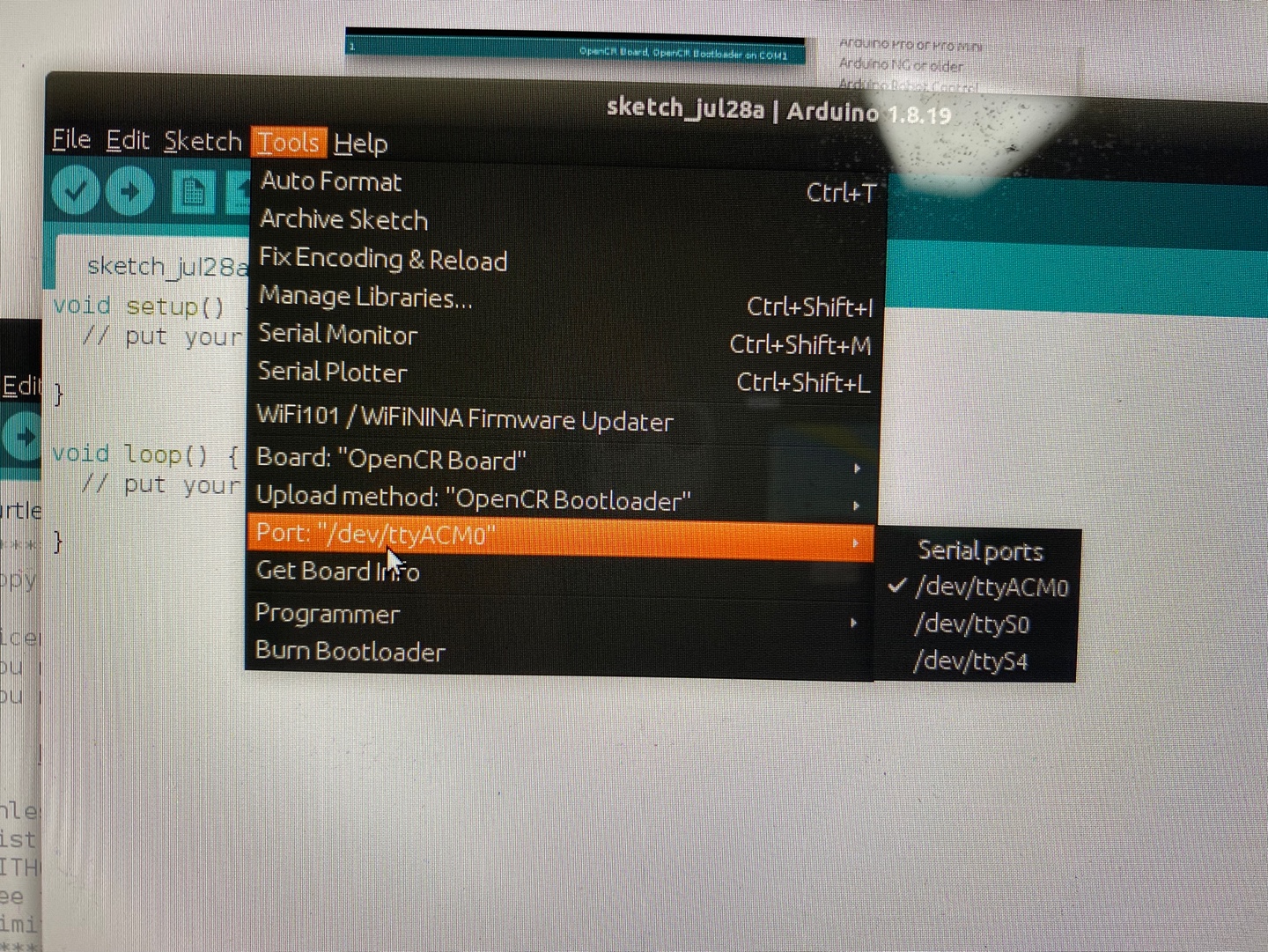
- 설치 후 Board에서 'OpenCR Board' 선택
참고 자료 :
https://jimnong.tistory.com/676
우분투 리눅스 듀얼부팅 설치방법 정리(윈도우10/윈도우11 기준)
우분투 리눅스 다운로드 방법(Desktop 버전) 우분투 리눅스 설치용 USB 만드는 법(윈도우에서) 우분투 리눅스 설치용 USB 만드는 법(Ubuntu 16.04 에서) 에 이어... 우분투 듀얼부팅 설치방법을 설명하고
jimnong.tistory.com
https://www.notion.so/2-4-1fbb5344e1584e7cbfa291e4c0f27526
2.4 소프트웨어 설치하기
모바일 로봇을 구동하기 위해 소프트웨어를 설치해야 합니다. 소프트웨어는 크게 3가지로 구분 되어지며, 순서대로 진행한다면 쉽게 설치할 수 있습니다. 여기에서는 우선 ROS1을 설치해서 터
www.notion.so
'Project > KUSMO' 카테고리의 다른 글
| [KUSMO] 9/27 (0) | 2022.09.28 |
|---|---|
| [KUSMO] 8/13 ~ 15 (Ubuntu 20.04 듀얼부팅, SLAM, Navigation, Simulation) (0) | 2022.08.17 |
| [KUSMO] 8/9 ~ 8/12 (Raspberry PI OS 관련 문제) (0) | 2022.08.16 |
| [KUSMO] 8/1 ~ 8/5 (Raspberry PI OS 관련 문제) (0) | 2022.08.06 |
| [KUSMO] 7/29 ~ 31 (노트북, Raspberry PI 초기 설정) (0) | 2022.07.30 |



