https://github.com/IntelRealSense/realsense-ros/blob/ros1-legacy/README.md#installation-instructions
GitHub - IntelRealSense/realsense-ros: Intel(R) RealSense(TM) ROS Wrapper for D400 series, SR300 Camera and T265 Tracking Module
Intel(R) RealSense(TM) ROS Wrapper for D400 series, SR300 Camera and T265 Tracking Module - GitHub - IntelRealSense/realsense-ros: Intel(R) RealSense(TM) ROS Wrapper for D400 series, SR300 Camera a...
github.com
- Install realsense2 on Ubuntu 18.04 in Jetson Xavier
https://github.com/IntelRealSense/librealsense/blob/master/doc/installation_jetson.md
GitHub - IntelRealSense/librealsense: Intel® RealSense™ SDK
Intel® RealSense™ SDK. Contribute to IntelRealSense/librealsense development by creating an account on GitHub.
github.com
- Install IntelRealSense SDK
$ roslaunch realsense2_camera demo_pointcloud.launch

$ roslaunch realsense2_camera rs_rgbd.launch

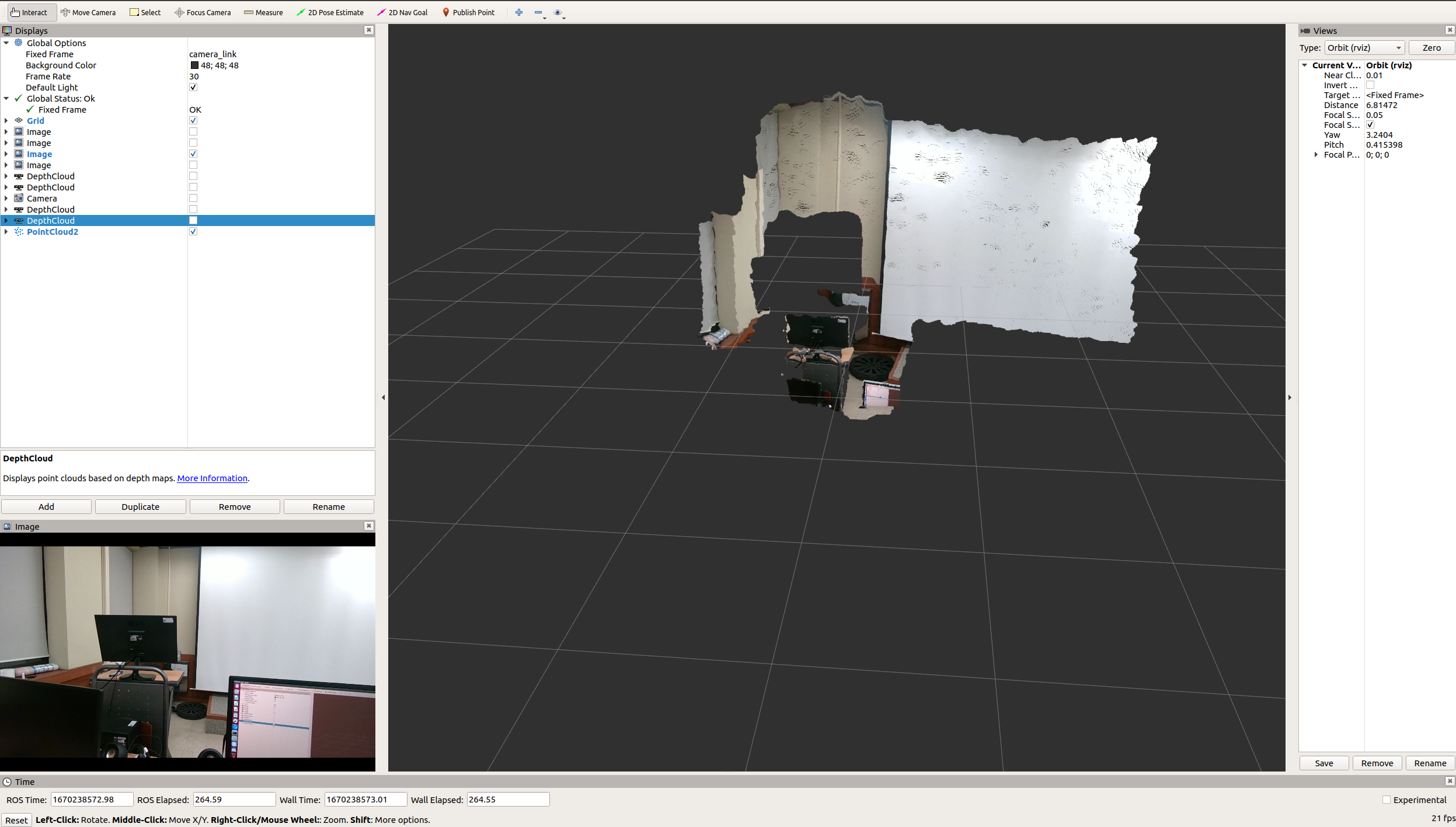
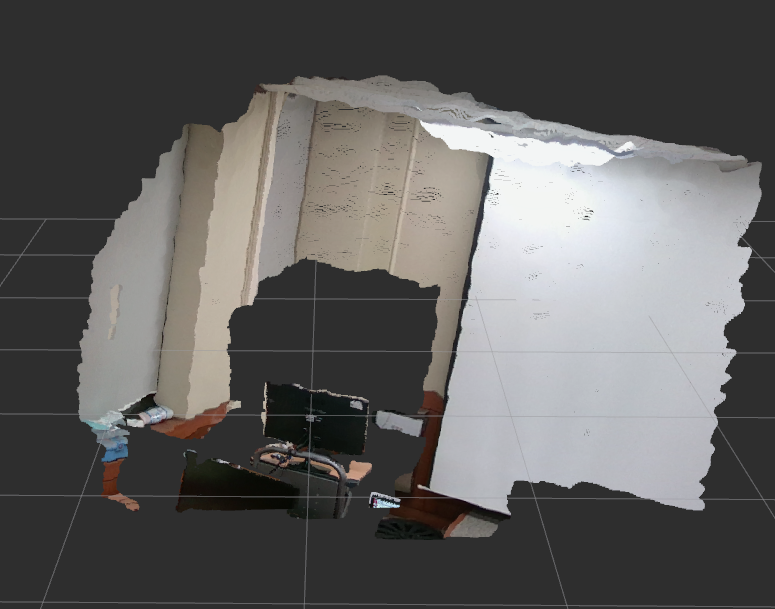
- Visualize PointCloud Value in Rviz
$ rostopic echo /camera/depth_registered/point

<?xml version="1.0"?>
<launch>
<!-- iAHRS arguments -->
<param name="m_bSingle_TF_option" type="bool" value="true" /> <!--false-->
<node pkg="iahrs_driver" type="iahrs_driver" name="iahrs_driver" output="screen" />
<!-- RPLidar arguments -->
<node name="rplidarNode" pkg="rplidar_ros" type="rplidarNode" output="screen">
<param name="serial_port" type="string" value="/dev/ttyUSB2"/>
<param name="serial_baudrate" type="int" value="115200"/><!--A1/A2 -->
<!--param name="serial_baudrate" type="int" value="256000"--><!--A3 -->
<param name="frame_id" type="string" value="laser"/>
<param name="inverted" type="bool" value="false"/>
<param name="angle_compensate" type="bool" value="true"/>
</node>
<arg name="camera" default="camera"/>
<arg name="tf_prefix" default="$(arg camera)"/>
<arg name="external_manager" default="false"/>
<arg name="manager" default="realsense2_camera_manager"/>
<!-- Camera device specific arguments -->
<arg name="serial_no" default=""/>
<arg name="usb_port_id" default=""/>
<arg name="device_type" default=""/>
<arg name="json_file_path" default=""/>
<arg name="fisheye_width" default="-1"/>
<arg name="fisheye_height" default="-1"/>
<arg name="enable_fisheye" default="false"/>
<arg name="depth_width" default="-1"/>
<arg name="depth_height" default="-1"/>
<arg name="enable_depth" default="true"/>
<arg name="infra_width" default="-1"/>
<arg name="infra_height" default="-1"/>
<arg name="enable_infra1" default="false"/>
<arg name="enable_infra2" default="false"/>
<arg name="color_width" default="-1"/>
<arg name="color_height" default="-1"/>
<arg name="enable_color" default="true"/>
<arg name="fisheye_fps" default="-1"/>
<arg name="depth_fps" default="-1"/>
<arg name="infra_fps" default="-1"/>
<arg name="color_fps" default="-1"/>
<arg name="gyro_fps" default="-1"/>
<arg name="accel_fps" default="-1"/>
<arg name="enable_gyro" default="false"/>
<arg name="enable_accel" default="false"/>
<arg name="enable_pointcloud" default="false"/>
<arg name="enable_sync" default="true"/>
<arg name="align_depth" default="true"/>
<arg name="filters" default=""/>
<arg name="publish_tf" default="true"/>
<arg name="tf_publish_rate" default="0"/> <!-- 0 - static transform -->
<!-- rgbd_launch specific arguments -->
<!-- Arguments for remapping all device namespaces -->
<arg name="rgb" default="color" />
<arg name="ir" default="infra1" />
<arg name="depth" default="depth" />
<arg name="depth_registered_pub" default="depth_registered" />
<arg name="depth_registered" default="depth_registered" unless="$(arg align_depth)" />
<arg name="depth_registered" default="aligned_depth_to_color" if="$(arg align_depth)" />
<arg name="depth_registered_filtered" default="$(arg depth_registered)" />
<arg name="projector" default="projector" />
<!-- Disable bond topics by default -->
<arg name="bond" default="false" />
<arg name="respawn" default="$(arg bond)" />
<!-- Processing Modules -->
<arg name="rgb_processing" default="true"/>
<arg name="debayer_processing" default="false" />
<arg name="ir_processing" default="false"/>
<arg name="depth_processing" default="false"/>
<arg name="depth_registered_processing" default="true"/>
<arg name="disparity_processing" default="false"/>
<arg name="disparity_registered_processing" default="false"/>
<arg name="hw_registered_processing" default="$(arg align_depth)" />
<arg name="sw_registered_processing" default="true" unless="$(arg align_depth)" />
<arg name="sw_registered_processing" default="false" if="$(arg align_depth)" />
<group ns="$(arg camera)">
<!-- Launch the camera device nodelet-->
<include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml">
<arg name="external_manager" value="$(arg external_manager)"/>
<arg name="manager" value="$(arg manager)"/>
<arg name="tf_prefix" value="$(arg tf_prefix)"/>
<arg name="serial_no" value="$(arg serial_no)"/>
<arg name="usb_port_id" value="$(arg usb_port_id)"/>
<arg name="device_type" value="$(arg device_type)"/>
<arg name="json_file_path" value="$(arg json_file_path)"/>
<arg name="enable_pointcloud" value="$(arg enable_pointcloud)"/>
<arg name="enable_sync" value="$(arg enable_sync)"/>
<arg name="align_depth" value="$(arg align_depth)"/>
<arg name="fisheye_width" value="$(arg fisheye_width)"/>
<arg name="fisheye_height" value="$(arg fisheye_height)"/>
<arg name="enable_fisheye" value="$(arg enable_fisheye)"/>
<arg name="depth_width" value="$(arg depth_width)"/>
<arg name="depth_height" value="$(arg depth_height)"/>
<arg name="enable_depth" value="$(arg enable_depth)"/>
<arg name="color_width" value="$(arg color_width)"/>
<arg name="color_height" value="$(arg color_height)"/>
<arg name="enable_color" value="$(arg enable_color)"/>
<arg name="infra_width" value="$(arg infra_width)"/>
<arg name="infra_height" value="$(arg infra_height)"/>
<arg name="enable_infra1" value="$(arg enable_infra1)"/>
<arg name="enable_infra2" value="$(arg enable_infra2)"/>
<arg name="fisheye_fps" value="$(arg fisheye_fps)"/>
<arg name="depth_fps" value="$(arg depth_fps)"/>
<arg name="infra_fps" value="$(arg infra_fps)"/>
<arg name="color_fps" value="$(arg color_fps)"/>
<arg name="gyro_fps" value="$(arg gyro_fps)"/>
<arg name="accel_fps" value="$(arg accel_fps)"/>
<arg name="enable_gyro" value="$(arg enable_gyro)"/>
<arg name="enable_accel" value="$(arg enable_accel)"/>
<arg name="filters" value="$(arg filters)"/>
<arg name="publish_tf" value="$(arg publish_tf)"/>
<arg name="tf_publish_rate" value="$(arg tf_publish_rate)"/>
</include>
<!-- RGB processing -->
<include if="$(arg rgb_processing)"
file="$(find rgbd_launch)/launch/includes/rgb.launch.xml">
<arg name="manager" value="$(arg manager)" />
<arg name="respawn" value="$(arg respawn)" />
<arg name="rgb" value="$(arg rgb)" />
<arg name="debayer_processing" value="$(arg debayer_processing)" />
</include>
<group if="$(eval depth_registered_processing and sw_registered_processing)">
<node pkg="nodelet" type="nodelet" name="register_depth"
args="load depth_image_proc/register $(arg manager) $(arg bond)" respawn="$(arg respawn)">
<remap from="rgb/camera_info" to="$(arg rgb)/camera_info" />
<remap from="depth/camera_info" to="$(arg depth)/camera_info" />
<remap from="depth/image_rect" to="$(arg depth)/image_rect_raw" />
<remap from="depth_registered/image_rect" to="$(arg depth_registered)/sw_registered/image_rect_raw" />
</node>
<!-- Publish registered XYZRGB point cloud with software registered input -->
<node pkg="nodelet" type="nodelet" name="points_xyzrgb_sw_registered"
args="load depth_image_proc/point_cloud_xyzrgb $(arg manager) $(arg bond)" respawn="$(arg respawn)">
<remap from="rgb/image_rect_color" to="$(arg rgb)/image_rect_color" />
<remap from="rgb/camera_info" to="$(arg rgb)/camera_info" />
<remap from="depth_registered/image_rect" to="$(arg depth_registered_filtered)/sw_registered/image_rect_raw" />
<remap from="depth_registered/points" to="$(arg depth_registered)/points" />
</node>
</group>
<group if="$(eval depth_registered_processing and hw_registered_processing)">
<!-- Publish registered XYZRGB point cloud with hardware registered input (ROS Realsense depth alignment) -->
<node pkg="nodelet" type="nodelet" name="points_xyzrgb_hw_registered"
args="load depth_image_proc/point_cloud_xyzrgb $(arg manager) $(arg bond)" respawn="$(arg respawn)">
<remap from="rgb/image_rect_color" to="$(arg rgb)/image_rect_color" />
<remap from="rgb/camera_info" to="$(arg rgb)/camera_info" />
<remap from="depth_registered/image_rect" to="$(arg depth_registered)/image_raw" />
<remap from="depth_registered/points" to="$(arg depth_registered_pub)/points" />
</node>
</group>
</group>
</launch>- Configuration of integrated launch file(launch_ris)
- Copied rs_rgbd.launch`s command
$ roslaunch launch_ris launch_ris- launch integrated launch file

- ttyUSB0 : IMU
- ttyUSB2 : RPLidar
To do :
$ rosrun tf static_transform_publisher 0 0 0 0 0 0 1 imu_link camera_link 100



- tf를 묶어 여러 센서를 동시에 띄움
'Project > RIS' 카테고리의 다른 글
| [RIS] 1/2 (USB 장치의 Symbolic Link 생성법) (0) | 2023.01.02 |
|---|---|
| [RIS] 12/26 (MDAS) (0) | 2022.12.26 |
| [RIS] 12/3 (각종 오류) (0) | 2022.12.03 |
| [RIS] 12/1 (sdkmanager USB, external memory 사용) (0) | 2022.12.02 |
| [RIS] 11/24 (각종 센서 동시 동작) (0) | 2022.11.24 |

