728x90
2/2
- Jetson Nano Navigation Stack 구성 완료
- Launch File 구성
<?xml version="1.0"?>
<launch>
<!-- Transformation Configurations -->
<node pkg="tf" type="static_transform_publisher" name="base_link_to_laser" args="0.11 0 0.22 0 0 0 base_link laser 30" />
<!-- base_link to imu_link will be provided by the iahrs_driver -->
<node pkg="tf" type="static_transform_publisher" name="base_link_broadcaster" args="0 0 0.11 0 0 0 base_footprint base_link 30" />
<!-- odom to base_footprint transform will be provided by the robot_pose_ekf node -->
<!-- map to odom will be provided by the AMCL -->
<node pkg="tf" type="static_transform_publisher" name="map_to_odom" args="0 0 0 0 0 0 map odom 30" />
<!-- Wheel Encoder Tick Publisher and Base Controller Using Arduino -->
<!-- motor_controller_diff_drive_2.ino is the Arduino sketch -->
<!-- Subscribe: /cmd_vel -->
<!-- Publish: /right_ticks, /left_ticks -->
<node pkg="rosserial_python" type="serial_node.py" name="serial_node">
<param name="port" value="/dev/ttyUSB0"/>
<param name="baud" value="115200"/>
</node>
<!-- Lidar Data Publisher Using RPLIDAR from Slamtec -->
<!-- Used for obstacle avoidance and can be used for mapping -->
<!-- Publish: /scan -->
<node name="rplidarNode" pkg="rplidar_ros" type="rplidarNode" output="screen">
<param name="serial_port" type="string" value="/dev/ttyRpLidar"/>
<param name="serial_baudrate" type="int" value="115200"/>
<param name="frame_id" type="string" value="laser"/>
<param name="inverted" type="bool" value="false"/>
<param name="angle_compensate" type="bool" value="true"/>
</node>
<!-- IMU Data Publisher Using the IAHRS IMU Sensor -->
<param name="m_bSingle_TF_option" type="bool" value="true" /> <!--false-->
<node pkg="iahrs_driver" type="iahrs_driver" name="iahrs_driver" output="screen" />
<!-- Wheel Odometry Publisher -->
<!-- Subscribe: /right_ticks, /left_ticks, /initial_2d -->
<!-- Publish: /odom_data_euler, /odom_data_quat -->
<node pkg="localization_data_pub" type="ekf_odom_pub" name="ekf_odom_pub">
</node>
<!-- Extended Kalman Filter from robot_pose_ekf Node-->
<!-- Subscribe: /odom, /imu_data, /vo -->
<!-- Publish: /robot_pose_ekf/odom_combined -->
<remap from="odom" to="odom_data_quat" />
<remap from="imu_data" to="imu/data" />
<node pkg="robot_pose_ekf" type="robot_pose_ekf" name="robot_pose_ekf">
<param name="output_frame" value="odom"/>
<param name="base_footprint_frame" value="base_footprint"/>
<param name="freq" value="30.0"/>
<param name="sensor_timeout" value="1.0"/>
<param name="odom_used" value="true"/>
<param name="imu_used" value="true"/>
<param name="vo_used" value="false"/>
<param name="gps_used" value="false"/>
<param name="debug" value="false"/>
<param name="self_diagnose" value="false"/>
</node>
<!-- Initial Pose and Goal Publisher -->
<!-- Publish: /initialpose, /move_base_simple/goal -->
<!-- Launch Rviz -->
<node pkg="rviz" type="rviz" name="rviz">
</node>
<!-- Subscribe: /initialpose, /move_base_simple/goal -->
<!-- Publish: /initial_2d, /goal_2d -->
<!-- Launch rviz_click_to_2d node -->
<node pkg="localization_data_pub" type="rviz_click_to_2d" name="rviz_click_to_2d">
</node>
<!-- Map File -->
<arg name="map_file" default="/home/kusmo/catkin_ws/maps/test.yaml"/>
<!-- Map Server -->
<!-- Publish: /map, /map_metadata -->
<node pkg="map_server" name="map_server" type="map_server" args="$(arg map_file)" />
<!-- Add AMCL example for differential drive robots for Localization -->
<!-- Subscribe: /scan, /tf, /initialpose, /map -->
<!-- Publish: /amcl_pose, /particlecloud, /tf -->
<include file="$(find amcl)/examples/amcl_diff.launch"/>
<!-- Move Base Node -->
<!-- Subscribe: /move_base_simple/goal -->
<!-- Publish: /cmd_vel -->
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find navstack_pub)/param/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find navstack_pub)/param/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find navstack_pub)/param/local_costmap_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find navstack_pub)/param/global_costmap_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find navstack_pub)/param/base_local_planner_params.yaml" command="load" />
</node>
</launch>
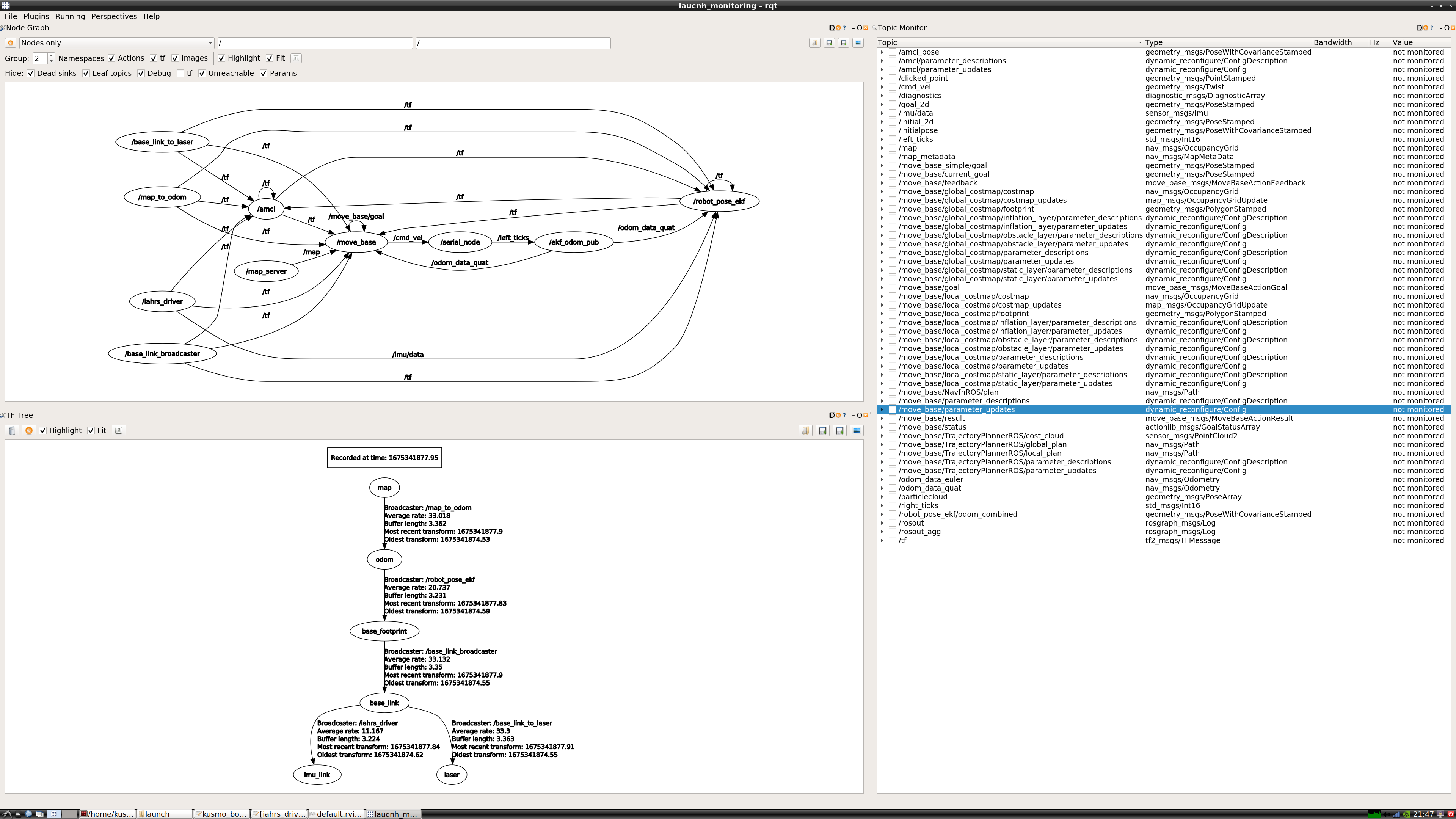
- Launch file 실행 결과 (Hector SLAM을 통해 연구실 내의 map을 미리 생성하고 'test'라는 이름으로 저장
- 두 DC 모터중 한쪽 모터가 회전하면 반대쪽 모터의 엔코더값이 같이 증가하는 문제 발생
- 코드상의 문제나 노이즈가 원인으로 추정됨
- base_footprint와 odom간에 X축 상으로 많은 거리차이가 있음
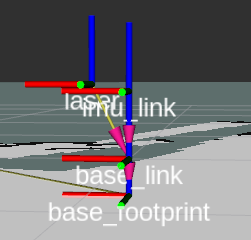
- tf 구성 결과
2/3
- 각 엔코더의 전원을 따로 공급하여 Encoder 관련 문제 해결
- L298N의 PWM과 INT 핀을 Arduino에 연결
- 모터가 직선 방향으로는 잘 주행하나 나머지 방향으로는 제대로 주행하지 못함
- Lidar가 제대로 동작하지 못함

2/5
- DC Motor Encoder 값 관련 수정
- 기존 DC 모터에서 BLDC 모터로 변경

'Project > KUSMO' 카테고리의 다른 글
| [KUSMO] 2/14 ~ 3/25 (0) | 2023.03.25 |
|---|---|
| [KUSMO] 2/14 (중간 요약) (0) | 2023.02.13 |
| [KUSMO] 1/20 (Jetson Nano Developer Kit 2GB 설정법) (0) | 2023.01.20 |
| [KUSMO] 1/8 (LN298N, USB Port 설정, 아두이노 stray ‘\302’ in program 에러) (0) | 2023.01.08 |
| [KUSMO] 11/23 (Raspberry Pi Master-Slave 통신, Hector SLAM, Map 저장) (0) | 2022.11.24 |



