- 로봇상의 Jetson Nano에 자율주행을 위한 환경 구축

https://youngseong.tistory.com/121
[RIS] 1/2 (USB 장치의 Symbolic Link 생성법)
- USB Port 설정법 각 센서를 제작한 회사에서 지원하는 프로그램을 이용하여 윈도우에서 USB Port의 Serial을 변경 $ ls -al /dev/serial/by-id USB 장치에 부여된 이름 확인 (터미널 창 사진 추가) $ lsusb 위 명
youngseong.tistory.com
- 위 포스트를 참고하여 Lidar, IMU, RS485 Converter(모터 드라이버용)에 대한 Symbolic Link 생성

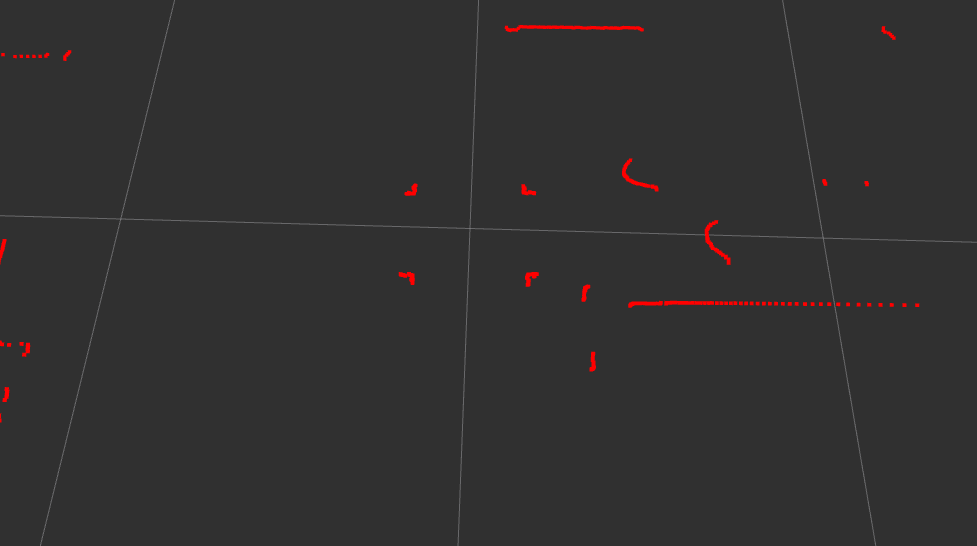
- 위 사진처럼 4방향의 알루미늄 프로파일을 장애물로 인식하는 문제 발생

- Jeston Nano에서 Lidar, IMU, Motor 동시 구동시 위와 같은 오류창이 뜨며 Lidar의 Scan값이 들어오지 않음
- 자료 탐색 결과 공급 전력 부족 문제로 인해 발생
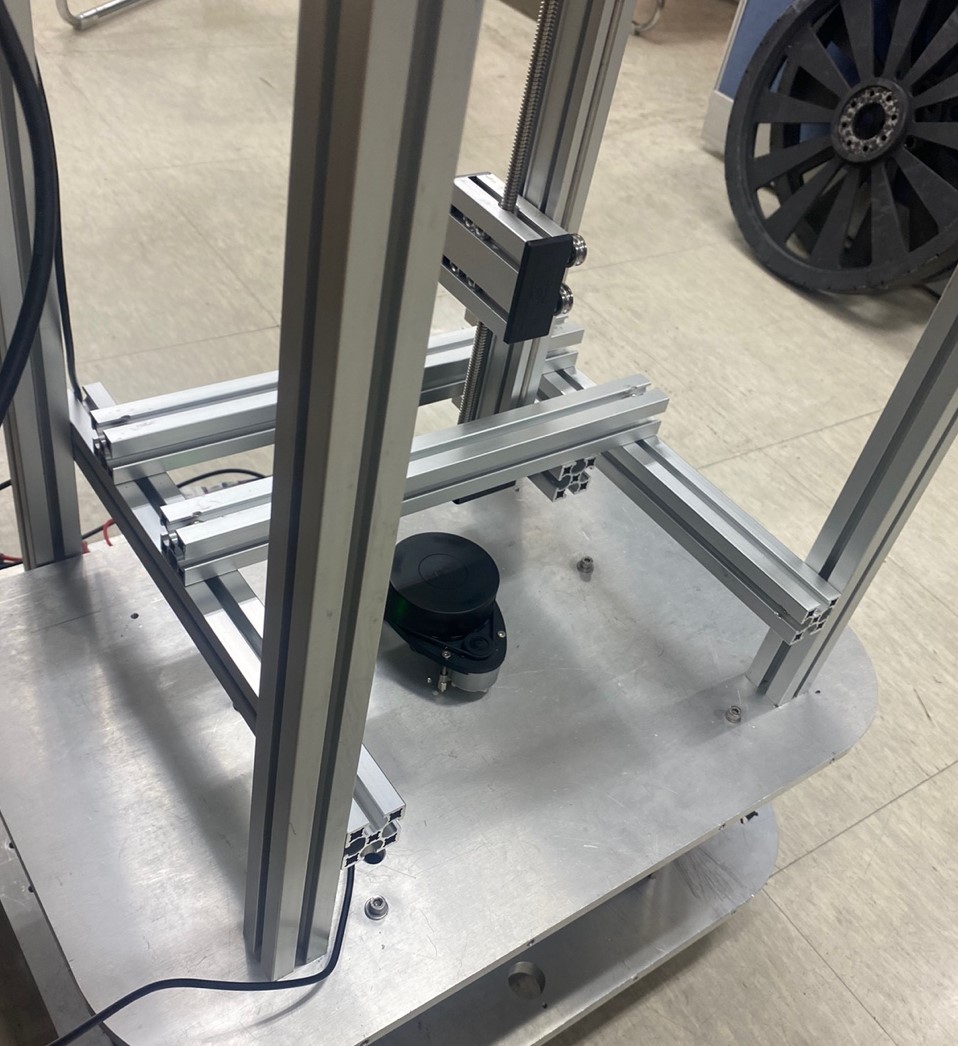
- 아래 사진과 같이 USB 확장 포트를 통해 센서들을 병렬로 연결하여 전류가 부족함이 원인으로 생각됨

- Jetson Nano에 모니터를 연결하여 사용하는데 아래와 같은 경고표시가 뜨며 화면이 꺼짐

- 자료 탐색 결과 Jetson Nano 의 저전압 (under voltage) 또는 과전류를 방지하기 위한 매커니즘 경고장치
- 이는 실제로 낮은 공급 전압과 과전류로 인한 현상이라고 함
- 이를 해결하기 위해선 전력 손실을 줄이기 위해 전원에 연결하는 microUSB를 최대한 짧은 것을 사용하거나
- 최소 5.5V, 3A 이상 규격의 USB 어탭터를 사용해야 함
- 현재 아래 사진처럼 Jetson Nano에 모니터 뒷면의 보드에서 제공하는 전원을 사용하였으나, 문제 해결을 위해 따로 5V를 공급

- 각 센서들 간의 거리 측정 후 TF Tree 구성



- Jetson Nano에서 IMU, Lidar를 구동시킨 후 Remote PC상에서의 센서값 수신 성공
https://youngseong.tistory.com/111
[KUSMO] 11/23 (Raspberry Pi Master-Slave 통신, Hector SLAM, Map 저장)
Raspberry Pi의 data를 Remote PC(노트북)로 보내기 위해 Master-Slave 통신 사용 Raspberry Pi에 Launch File 구성 Raspberry Pi에서 RPLidar를 실행시키고 노트북에서 Hector SLAM package 실행 Hector SLAM이란 : 2D LiDAR의 적은
youngseong.tistory.com
- 위 포스트를 참고하여 Hector SLAM 진행

- Navstack을 통한 센서 구동 후 Remote PC 상에서의 Hector SLAM 성공

https://youngseong.tistory.com/145
ROS Noetic Cartographer 사용법
- 전제 조건 ROS Noetic 설치(Ubuntu 20.04에서 진행. 다른 version의 경우 해당 ubuntu version에 맞는 ROS 설치) http://wiki.ros.org/noetic/Installation/Ubuntu noetic/Installation/Ubuntu - ROS Wiki If you rely on these packages, please sup
youngseong.tistory.com
- 위 포스트를 참고하여 Cartographer SLAM Setup 완료
https://github.com/Slamtec/rplidar_ros/issues/86
Can not start scan: 80008002! · Issue #86 · Slamtec/rplidar_ros
I am currently using a RPLidar A1 with a Raspberry Pi 4B and keep getting this error when i launch the ROS-node [ INFO] [1653237839.801351212]: RPLIDAR running on ROS package rplidar_ros, SDK Versi...
github.com
https://developer-itspjc.tistory.com/20
"system throttled due to overcurrent" 경고가 날 경우 - Jetson Nano
Jetson Nano에서 주로 모니터에 연결해서 사용하다보면 "system throttled due to overcurrent" 라는 경고를 볼 수 있다. 원인의 이유에 대해서는 아래 링크를 참고할 수 있는데, https://forums.developer.nvidia.com/t/sy
developer-itspjc.tistory.com
'Project > KUSMO' 카테고리의 다른 글
| [KUSMO] 5/31 (0) | 2023.05.31 |
|---|---|
| [KUSMO] 5/29 (0) | 2023.05.29 |
| [KUSMO] 5/22 Object Tracking Using RealSense in ROS Melodic (0) | 2023.05.22 |
| [KUSMO] 5/12 미팅 준비 자료 (0) | 2023.05.11 |
| [KUSMO] 4/19 ~ 5/6 (0) | 2023.05.07 |



