728x90
- 자율주행 배액 수거 로봇
- 기존의 실내 식당 그릇 수거 로봇에서 병원에서 활용 가능한 배액 수거 로봇으로 주제 변경
- 병원, 요양원 등의 거동이 불편한 환자를 간병하는 시설에서 사용 가능한 로봇
- 호출된 침대로 자율주행을 통해 이동 후 2 DOF Linear Actuator를 통해 배액 주머니 컨테이너에 접속
- Hector / Cartographer SLAM을 통한 Mapping (계획)
- 자율주행에는 AMCL(Adpative Monte Carlo Localization)을 통한 Localization과 DWA (Dynamic Window Approaches) 알고리즘을 통한 Navigation 진행 (계획)
- 배액 수거 완료 후 처리
- 개발 진행 상황
- 현재 구동부 설계 완료 후 주행 테스트 진행 완료







- IMU, Lidar 연결 후 Jetson Nano상에서의 ROS 환경에서의 자율주행 test 진행
- 접속부 설계 및 구성 필요
- ROS 기반 Navigation Stack 구성 내용
https://github.com/YoungSeong98/Project_KUSMO
GitHub - YoungSeong98/Project_KUSMO
Contribute to YoungSeong98/Project_KUSMO development by creating an account on GitHub.
github.com
- 기능 관련 초기 발상


- 로봇이 지정된 구역에서 대기하다 호출 시 자율주행을 통해 배액주머니 컨테이너 근처까지 이동
- 도착 후 로봇 내의 벨브 접속용 엑추에이터를 통해 컨테이너에 접속 후 배액 수거
- SP 커플러를 통한 접속

- 배액주머니 컨테이너는 병실의 침대에 달려있을 예정 (대략 40~60cm의 높이)
- 추후 과제 : 2DOF Linear Actuor를 통해 배액주머니 컨테이너의 접속부에 접속할 방안 결정 필요
1. 수평 방향에서의 접속
- 자율주행을 통해 배액 컨테이너 부근까지 이동 후 Line Tracing을 통해 컨테이너 앞까지 정밀 주행
- 카메라로 Aruco Marker 인식 등의 방법을 통해 접속부에 연결
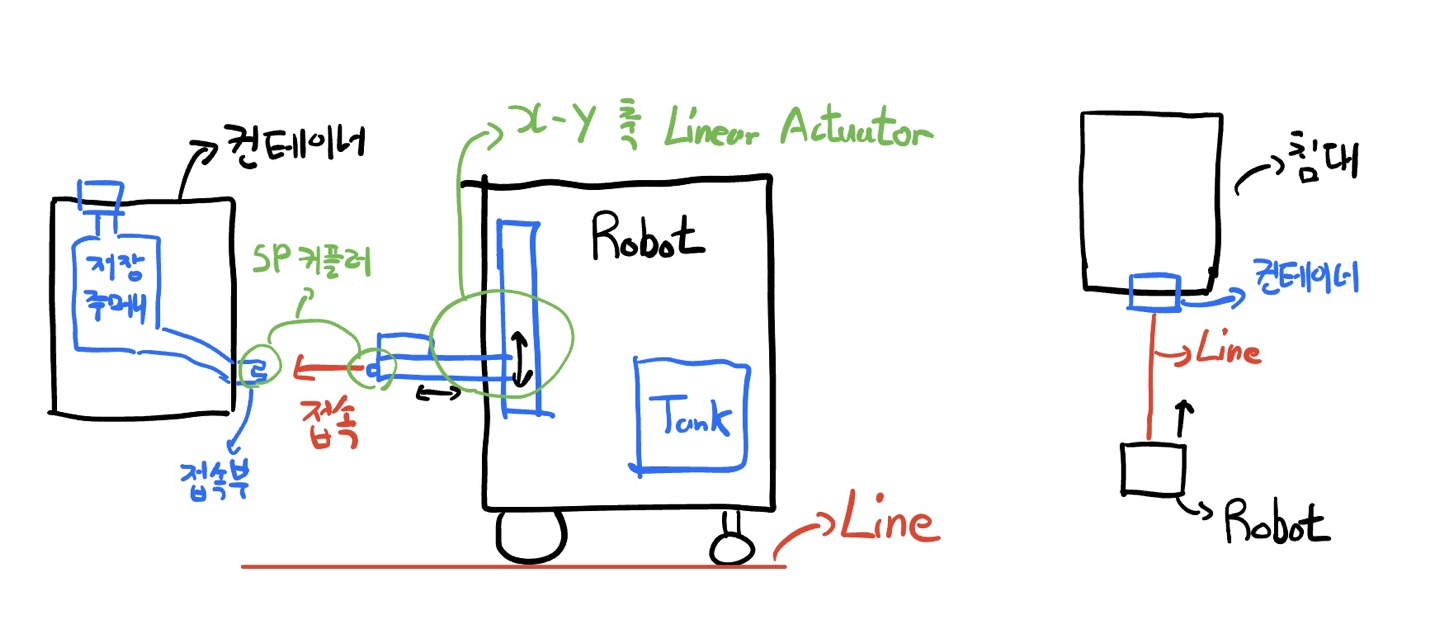
- 연결간에 Orientation (Yaw)이 조금이라도 있을 경우 접속이 어려울 수 있으므로 이를 정확하게 보정해줘야 하는 어려움이 있음

2. 수직 방향에서의 접속
- 수평 방향에서의 접속과 동일하게 자율주행을 통해 배액 컨테이너 부근까지 이동
- 수평 방향에 비해 yaw를 고려하지 않아도 되므로 접속에 더 편리
- 컨테이너의 접속부를 바닥과 수평하게 Calibration하고 x, y 좌표만 제어하면 연결이 가능할 것으로 추측

- 자율주행을 통해 컨테이너 부근까지 이동 후 접속부를 인식하고 접근 할 방안 고려 필요
- 위 두가지 방법 중 수직 접속 방안이 고려해야 할 변수가 적으므로 (yaw 고려 X) 현재 수직 접속 고려중
'Project > KUSMO' 카테고리의 다른 글
| [KUSMO] 5/28 (0) | 2023.05.28 |
|---|---|
| [KUSMO] 5/22 Object Tracking Using RealSense in ROS Melodic (0) | 2023.05.22 |
| [KUSMO] 4/19 ~ 5/6 (0) | 2023.05.07 |
| [KUSMO] 5/3 (0) | 2023.05.03 |
| [KUSMO] 3/26 ~ 4/18 (0) | 2023.04.18 |



