728x90
반응형
- Navigation Stack Launch 성공
- Hector SLAM을 통한 Mapping 후 해당 Map상에서의 Navigation 진행

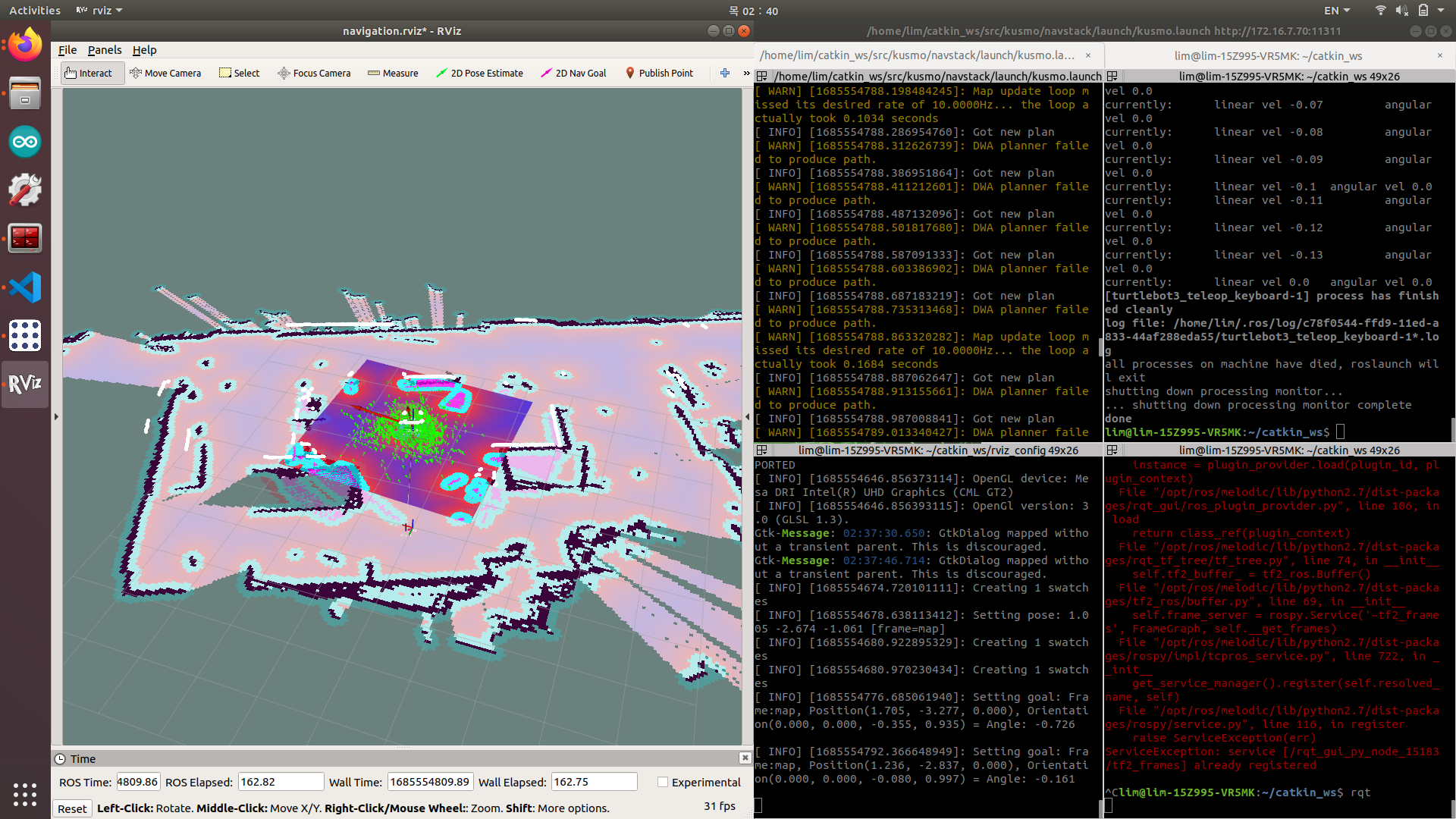

- Navigation 진행 시의 Node Graph와 TF Tree

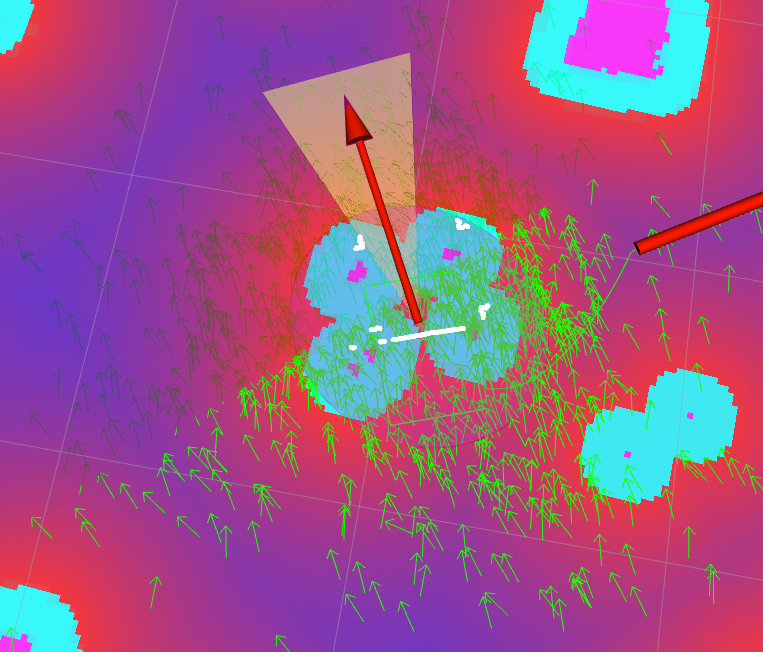
- 현재 위 사진처럼 라이다 사방에 올려져있는 프로파일을 장애물로 인식하는 문제가 있어 이를 해결해야 함
- laser_filters package를 통한 필터링을 통해 Lidar의 특정 각도 무시 가능
ROS 라이다 scan 신호를 필터링하고 싶을때 laser filters pkg
주행로봇을 다루다 보면 스캔 scan 토픽을 발행해주는 라이다를 사용할때가 많은데요. 로봇의 기구적 형상과 라이다의 종류나 성능애 따라 적절한 필터를 넣어주어야할 때가 많을 겁니다. 라이
pinkwink.kr
- 센서 관련
IAHRS_manual_rb_sda_ob_v_dn_2.0.1_210607.pdf
3.84MB
rplidar-a1m8-360-degree-laser-scanner-development-kit-datasheet-1.pdf
1.72MB
Intel-RealSense-D400-Series-Datasheet-March-2023.pdf
4.92MB
- 위의 datasheet들을 참고하여 필요 전압, 전류량 조사
- IAHRS(RB-SDA-v1) : 4.2~12V, 50mA
- RPLidar A1 : 5V, 100mA
- RealSense D457 : 5V, 700mA (Vision Processor D4 Board)
- Jetson Nano : 5V, 3A
- 센서들만 따졌을 때 총 5V, 850mA 필요
- Navigation Stack Launch 파일에 RealSense 추가
728x90
반응형
'Project > KUSMO' 카테고리의 다른 글
| [KUSMO] 6/4 Arduino Symbolic Link 생성, laser_filters를 통한 프로파일 제거 (0) | 2023.06.04 |
|---|---|
| [KUSMO] 5/31 (0) | 2023.05.31 |
| [KUSMO] 5/28 (0) | 2023.05.28 |
| [KUSMO] 5/22 Object Tracking Using RealSense in ROS Melodic (0) | 2023.05.22 |
| [KUSMO] 5/12 미팅 준비 자료 (0) | 2023.05.11 |



