- 위 내용은 아래의 Project에서 진행한 내용을 기반으로 정리됨
https://youngseong.tistory.com/category/Project/KUSMO
- 이 글에선 Navigation까지의 System 구성이 아닌, System 구성 완료 후 원활한 Navigaion 수행을 위한 정보들을 정리함
- Navigation을 위한 System 구성 과정은 아래 글들 참고
https://youngseong.tistory.com/140
https://youngseong.tistory.com/102
- Navigation : Robot이 주어진 환경에서 현재 위치로부터 지정한 목적지까지 이동하는 것
- Navigation Stack : Navigation 수행을 위해 구성된 Software의 집합

- Navigation Stack 구성 요소
- Sensor Source : Lidar, IMU 등의 각종 Sensor들을 통해 얻은 data들. 해당 data들은 Localization과 Navigation 시 장애물을 인지하는데 쓰임
- Sensor Transform/TF : 서로 다른 Frame에 위치한 Sensor들의 상대적인 위치를 정의하여 모든 Sensor Data들을 한 Frame킴(보통 'base_link' 사용)으로 통일시킴
- Odometry Source : Robot의 출발 위치와 그 위치에 대해 상대적인 Robot의 이동 거리 정보 제공. Odometry 정보를 Encoder, IMU를 통해 계산하여 nav_msgs/Odometry 형식의 Message를 통해 Navigation Stack으로 Publish함
- Base Controller : Navigation Stack이 Odometry 정보를 받아 출력한 Twist(geometry_msgs/Twist) Messgae를 받아와 그에 대응하는 Velocity Command인 cmd_vel을 Motor에 입력하여 Motor의 속도로 변환함
- Navigation 수행을 위해선 아래의 4가지 요소들이 필요함
- 주행할 Map 생성(Mapping)
- 장애물을 인식하는 Sensing
- Map상에서 자신(Robot)의 위치를 파악하는 Localization
- Map상에서 목표지점까지의 경로를 계산하는 Path Palnning과 해당 Path상으로 이동하는 Moving
1. Mapping
- Map은 Localization과 Mapping을 동시에 수행하는 SLAM (Simultaneous Localization And Mapping)을 통해 생성
- SLAM은 Hector SLAM, Gmapping, Cartographer SLAM 등의 Algorithm을 통해 수행 가능
- Hector / Cartographer SLAM 수행 방법 : https://youngseong.tistory.com/145
2. Sensing
- Lidar, IMU 등을 통한 장애물 인식과 Robot의 자세 추종
3. Localization
- Robot에 이동 명령을 내려 움직일 때, 여러 내/외부 요인들로 인해 Robot이 항상 우리의 의도와 정확히 일치하게 움직이지 않는다
- 따라서 Robot이 이동할 때 Robot이 위치할 확률을 무작위 Particle로 나타냄
- 각 Particle은 Robot의 위치/자세를 나타냄
- Robot이 이동하며 Sensor를 통해 주변 환경을 관측하며 현재의 환경과 맞지 않는 Particle은 무시하고 비슷한 Particle에 가중치를 더 주어 주변에 새로운 Particle을 생성함
- 이 과정을 재귀적으로 반복하여 Robot의 현재 위치와 비슷한 곳에 다수의 Particle들을 생성함
- 위와 같이 Localization을 수행하는 방법을 MCL(Monte Carlo Localizaiton) 또는 Particle Filter Localilzation 이라고 함
- 그리고 위의 MCL에서 적은 수의 sample을 사용하여 수행 시간을 줄여 실시간성을 높인 Algorithm이 AMCL (Adaptive MCL)
- ROS에서의 AMCL은 Motion Model이 Odometry Model에 해당하고, Measurement Model은 Laser Scan Model에 해당함
- AMCL 관련 Parameter (KUSMO에서 사용중인 amcl.launch file)
<?xml version="1.0"?>
<launch>
<!-- Define AMCL`s various parameters -->
<!-- Subscribe: /scan, /tf, /initialpose, /map -->
<!-- Publish: /amcl_pose, /particlecloud, /tf -->
<node pkg="amcl" type="amcl" name="amcl" output="screen">
<!-- Important Parameters -->
<param name="odom_model_type" value="diff"/>
<param name="odom_frame_id" value="odom"/>
<param name="base_frame_id" value="base_footprint"/>
<param name="global_frame_id" value="map"/>
<!-- Particle Filter`s Performance Related Parameters -->
<param name="min_particles" value="500"/>
<param name="max_particles" value="5000"/>
<param name="kld_err" value="0.05"/>
<param name="kld_z" value="0.99"/>
<param name="update_min_d" value="0.2"/>
<param name="update_min_a" value="0.5"/>
<param name="resample_interval" value="1"/>
<param name="transform_tolerance" value="1.0"/>
<param name="gui_publish_rate" value="10.0"/>
<!-- Laser Model Parameters -->
<!-- RPLidar A1`s max laser beam is 360, A2 is 16384 -->
<param name="laser_max_beams" value="30"/>
<param name="laser_z_hit" value="0.5"/>
<param name="laser_z_short" value="0.05"/>
<param name="laser_z_max" value="0.05"/>
<param name="laser_z_rand" value="0.5"/>
<param name="laser_sigma_hit" value="0.2"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_likelihood_max_dist" value="2.0"/>
<param name="laser_model_type" value="likelihood_field"/>
<!-- Publish scans from best pose at a max of 10 Hz -->
<param name="odom_alpha5" value="0.1"/>
<remap from="scan" to="scan_filtered"/> <!-- Change scan topic to filtered topic -->
<!-- Use these parameters if you want to set robot`s initial pose manually-->
<!-- <param name="initial_pose_x" value="0"/> --> <!-- Set robot`s initial x pose -->
<!-- <param name="initial_pose_y" value="0"/> --> <!-- Set robot`s initial y pose -->
<!-- <param name="initial_pose_z" value="0"/> --> <!-- Set robot`s initial z pose -->
<param name="recovery_alpha_slow" value="0.0"/>
<param name="recovery_alpha_fast" value="0.0"/>
<!-- Estimated noise of odometry`s rotational momentum when rotating -->
<param name="odom_alpha1" value="0.2"/>
<!-- Estimated noise of odometry`s rotational momentum when doing translational momentum -->
<param name="odom_alpha2" value="0.2"/>
<!-- translation std dev, m -->
<!-- Estimated noise of odometry`s translational momentum when doing translational momentum -->
<param name="odom_alpha3" value="0.8"/>
<!-- Estimated noise of odometry`s translational momentum when rotating -->
<param name="odom_alpha4" value="0.2"/>
</node>
</launch>- 주요 Parameter
- odom_model_type (default : diff) : Robot의 Model 정의. diff, omni, diff-corrected, omni-corrected 등이 있다
- odom_frame_id (default : odom) : Odometry Frame의 이름 정의
- base_frame_id (default : base_link) : Robot의 Base Frame의 이름 정의
- global_frame_id (defalut : map) : Localization에 의해 Publish되는 좌표계의 이름 정의
- use_map_topic (default : false) : Node가 Topic 또는 Service Call에 의해 Map Data를 받을지 말지를 정의
- Particle Filter의 성능을 설정하는 Parameters
- min_particles (default : 100) : Particle Filter에서 사용할 최소 Particle 수
- max_particles (default : 5000) : Particle Filter에서 사용할 최대 Particle 수
- kld_err (default : 0.01) : 실제 분포와 추정 분포 사이의 최대 오차 설정
- update_min_d (default : 0.2) : Filter Update를 위해 Robot이 움직여야 할 최소한의 Linear 거리 (meter)
- update_min_a (default : π/6.0) : Filter Update를 위해 Robot이 움직여야 할 최소한의 angular 거리 (radian)
- resample_interval (default : 2) : Resampling 되기 이전에 Particle Filter를 Update하는 횟수 설정
- transform_tolerance (defalut : 1) : 이 Transform이 Publish 된 후 유효한 시간 설정 (second)
- gui_publish_rate (defalut : -1.0) : Visualization을 위해 Scan과 Path가 표시될 시간 설정 (Hertz). -1.0의 경우 해당 기능 비활성화
- Laser Model Parameters
- laser_min_range ( default: -1.0) : Laser Scan의 최소 거리 지정. -1.0일 경우 최소 거리 사용
- laser_max_range (double, default: -1.0) : Laser Scan의 최대 거리 지정. -1.0일 경우 최대 거리 사용
- laser_max_beams (int, default: 30) : Filter Update 시 각 scan의 얼만큼의 균일한 beam을 사용할지 결정
- laser_z_hit (double, default: 0.95) : Model의 z_hit 부분에 대한 혼합 가중치 설정
- laser_z_short (double, default: 0.1) : Model의 z_short 부분에 대한 혼합 가중치 설정
- laser_z_max (double, default: 0.05) : Model의 z_max 부분에 대한 혼합 가중치 설정
- laser_z_rand (double, default: 0.05) : Model의 z_rand 부분에 대한 혼합 가중치 설정
- laser_sigma_hit (double, default: 0.2 meters) : Model의 z_hit에 사용되는 Gaussian Model의 표준 편차 설정
- laser_lambda_short (double, default: 0.1) : Model의 z_short 부분에 대한 지수 감쇠 parameter
- laser_likelihood_max_dist (double, default: 2.0 meters) : likelihood_field model에 사용되는, Map상에서 Obstacle Inflation을 진행할 최대 거리
- laser_model_type (string, default: likelihood_field) : Laser Model 결정. beam, likelihood_field 등이 있다
4. Path Planning & Moving
- Velocity and Accelearion
- ROS에선 Translation/Rotational Velocity/Acceleration을 알아야 함
- DWA는 Minimum Velocity의 절댓값을 사용
-About move_base node
- move_base node Navigation 과정에서 발생하는 모든 요소들을 이어주는 ROS Navigtion Stack에서 매우 중요한 요소 중 하나이다. 충돌위험이 없는 경로를 계획하는데 중요한 역할을 한다
- move_base를 사용하기 위해선 Global/Local Planner가 필요함
- KUSMO에서는 navfn/DWA 사용중
- move_base node는 'geometry_msgs/PoseStamped' Message Type의 'goal pose'를 사용하는 SimpleActionServer이므로, SimleActionCilent를 사용하여 이 node로 goal points를 보냄
- Message : ROS상의 node간의 통신 형태
- Action : ROS에서 사용하는 Message Type 중 하나로, Client가 요청 전송 시 중간중간 feedback 전송 후 최종 결과를 전달
- 참고 : https://youngseong.tistory.com/75

- 해당 Action Server는 Navigation Stack의 입력으로써 move_base/goal_topic을 사용하며 이 topic은 goal pose를 제공하는데 사용됨
- 즉 Navigation 진행 시 Rviz의 '2D Nav Goal' 버튼을 통해 목표지점을 지정하면 'move_base/goal' topic으로 새로운 messgae가 publish됨
- move_base Action Server가 사용하는 Topic의 종류는 아래와 같다
- Action Subscribed Topics
- move_base/goal (move_base_msgs/MoveBaseActionGoal) : move_base가 실제 world에서 추구해야 할 goal
- move_base/cancel (actionlib_msgs/GoalID) : 특정 goal에 대한 cancel 요청
- Action Published Topics
- move_base/feedback (move_base_msgs/MoveBaseActionFeedback) : 실제 world에서 base의 현재 위치정보 제공
- move_base/status (actionlib_msgs/GoalStatusArray) : move_base action으로 전달된 goal에 대한 상태를 제공
- move_base/result (move_base_msgs/MoveBaseActionResult) : move_base action의 해당 topic은 비어있음
- move_base Action Server가 Publish/Subscribe 하는 Topic은 아래와 같다
- Subscribed Topic : move_base_simple/goal (geometry_msgs/PoseStamped) : User를 위한 Goal의 실행 상태를 추적하지 않는 non-action interface를 move_base에 제공한다
- Published Topic : cmd_vel (geometry_msgs/Twist) : Mobile Base에서 실행하기 위한 velocity Command의 Stream
- About Global Planner
- move_base node가 새로운 goal point를 받으면, 해당 goal은 바로 Global Planner로 보내짐
- 그 후 Global Planner는 goal point로 도착할 수 있는 안전한 경로를 계산
- Robot 이동 전에 계산하므로 그동안의 sensor data는 고려하지 않음
- Global Planner가 새로운 Path를 계획할 때마다 해당 Path는 '/plan' topic으로 publish됨
- About navfn
- navfn은 ROS Navigatio에서 자주 사용되는 Global Planner로, 시작점과 종료점 사이의 Global Path를 최소한의 비용을 들여 찾기 위해 Dijkstra Algorithm을 사용함
- Mobile base의 plan을 생성하기 위해 빠른 interpolated(보간-두 점을 연결하는 방법을 의미) navigation function을 제공함
- Navigation Function은 Dijkstra Algorithm을 통해 계산됨
- Circular Robot을 가정하여 costmap 상의 시작점부터 목표점까지의 최소한의 cost plan을 grid에서 찾음
- Costmap : Map을 Grid Cell로 표현한 후 각 Cell들에 Cost(0~255)를 부여하여 Robot이 해당 위치를 지나갈 수 있는지 없는지의 여부를 나타냄. 값이 클수록 장애물이 있어 지나갈 수 없음을 뜻함
- 참고 : https://youngseong.tistory.com/140

- Dijkstra Algorithm을 A* 알고리즘, quadratic approximation, toggling grid path 등의 Algorithm으로 대체하여 다른 Path를 계산하는 'Global Planner' 도 사용 가능
- navfn의 Parameters는 아래와 같다
- /allow_unknown (bool, default: true) : navfn이 unknown space를 지나는 path를 생성할 수 있도록 허용할지 여부를 결정. 만약 계층화 된 costmap_2d costmap을 voxel이나 obstacle layer와 함께 사용중이라면 해당 layer의 'track_unknown_space' parameter를 true로 설정해야 함 (그렇지 않으면 모든 unknown space를 free space로 convert하여 직선으로 주행하게 됨)
- /planner_window_x (double, default: 0.0) : Planner가 사용할 수 있는 window의 x 크기를 제한하여 큰 Costmap에서 navfn이 작은 크기의 window에서만 동작하도록 함
- /planner_window_y (double, default: 0.0) : Planner가 사용할 수 있는 window의 x 크기를 제한
- /default_tolerance (double, default: 0.0) : Goal Point와의 허용 오차 범위를 설정
- /visualize_potential (bool, default: false)
- cost_factor
- neutral_cost
- lethal_cost

- About Global Costmap
- Global Costmap은 SLAM을 통해 생성한 Static Map의 너비, 높이, 장애물의 정보에 맞게 초기화 됨
- Static Map : 환경이 바뀌더라도 Costmap은 바뀌지 않는다
- 위 설정은 AMCL 등의 Localization System과 함께 Fusion 됨
# global_costmap_params.yaml
global_costmap:
global_frame: map # Costmap이 작동할 때의 Global Frame. map이 default
robot_base_frame: base_footprint # "" Robot의 Base Frame
update_frequency: 10.0 # Map Update Frequency
publish_frequency: 10.0 # Map Publish Frequency
transform_tolerance: 2.0
static_map: true # Costmap 초기화 시 Static Map의 사용 여부 결정
rolling_window: false # Costmap의 Rolling Window 사용 여부 결정
# static_map : true이면 해당 parameter는 false이어야 함
plugins:
- {name: static_layer, type: "costmap_2d::StaticLayer"} # Static Map으로부터 Costmap을 초기화 하기 위해 사용
- {name: obstacle_layer, type: "costmap_2d::VoxelLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"} # 장애물을 Inflate 하기 위해 사용
# 각 layer는 name, type 형식의 dictionary. Name은 plugin을 위한 Parameter Namespace 정의에 사용
# 위 값들은 common_costmap_params.yaml file에서 정의됨- YAML file로 정의된 Global Costmap 관련 Parameters
- Costmap의 설정을 간단명료하게 하기 위해 ROS의 layer 사용. Layer는 관련 Parameter들의 일종의 Block 역할
# common_costmap_params.yaml
obstacle_layer:
enabled: true
max_obstacle_height: 1.113 # Maximum height of obstacles to consider
origin_z: 0.0 # Origin height for the costmap
z_resolution: 0.2 # Parameters related to voxel height representation wth z_voxels
z_voxels: 10 # Threshold value above which a voxel is considered unknown
unknown_threshold: 15 # Threshold value above that indicates whether a cell is considered unknown or not
mark_threshold: 0 # Threshold value below that indicates whether a cell is considered free
combination_method: 1 # Method used to combine multiple obsevations. 1 represents maximum-likehood estimation
track_unknown_space: true # Indicates whether to track unknown space in the costmap. Prevents converting all unknwon space to free space
# origin_z: 0.0
publish_voxel_map: false
observation_sources: laser_scan_sensor
laser_scan_sensor: {sensor_frame: laser, data_type: LaserScan, topic: scan, marking: true, clearing: true}
inflation_layer:
enabled: true
cost_scaling_factor: 20.0
inflation_radius: 0.3 # Scaling factor applied to the cost values around obstacles
# The best path is for the robot to pass through a center of between obstacles,
# so set this factor to be smaller in order to far from obstacles
# It is an reciprocal portion
static_layer:
enabled: true
- About Local Planner
- Global Planner가 Path를 계산하면, 해당 Path는 Local Planner로 보내지고 Local Planner가 해당 Global Plan을 분할한 각 부분들을 실행함
- Local Plan이 Global Plan의 일부분
- 따라서 Local Planner는 Robot을 움직이도록 하기 위해 Velocity Command를 출력함
- Global Planner와 달리 Local Planner는 Odometry, Laser Scan Data를 계속 확인하며 충돌 가능성이 없는 Local Plan을 선택한다. 따라서 Local Planner는 Robot의 장애물과의 충돌 방지를 위해 Path를 즉시 재계산 할 수 있음
- Local Plan 계산 완료 시 '/local_plan' topic으로 publish 됨
- Local Planner는 Robot의 Odometry 정보를 가지고 있는 '/odom' message를 받아와 Robot의 Motion을 Control하는 Velocity Command인 '/cmd_vel' topic을 출력한다
- Local Planner의 종류로는 DWA(Dynamic Window Approach), TEB(Time Elastic Band)등이 있다
- Local Planner의 종류
1. base_local_planner
- Global Plan을 계산하고 실행하기 위해 Trajectory Rollout과 DWA Algorithm을 제공함
- 상새 과정은 아래와 같다
- Robot의 Control Space로부터 불연속적으로 Sampling 진행
- 각 Sampling 된 속도에 대해 현재 Robot의 상태에서 Simulation을 진행하여 현재 상태에서 Robot이 움직일지 예측
- Simulation에 의한 결과로 나온 Path 평가
- 부적절한 Path 제거
- 가장 점수가 높은 Path 선택 후 그에 관한 속도 값을 Mobile Base로 보냄
- 위 과정을 반복
- Trajectory Rollout Sample은 Robot의 Acceleration 제한 내에서 주어진 모든 Simulation에 대한 Velocity의 집합이나 DWA는 단일 Step의 Simulation을 사용
1-1. dwa_local_planner
- dwa_local_planner는 Dynamic Window Approach Algorithm을 적용한 local planner. 가장 많이 사용되는 Local Planner
- DWA의 목표는 Robot의 Local Condition에 대한 최적의 Circular Trajectory를 나타내는 (v, w) - (직선 속도, 각속도) 쌍을 생성하는 것
- 다음 시간 간격에서의 Velocity를 찾음으로써 위 목표에 도달함
- 이 공간에서의 Velocity는 허용될 수 있도록 제한되며, 이는 허용 가능한 Velocity에 의해 결정되는 Circular Trajectory상의 가장 가까운 장애물에 Robot이 도달하기 전에 멈출 수 있어야 함을 의미함
- 또한 DWA는 현재의 Translation / Rotational Velocity와 Acceleration이 주어진 후 다음 시간 간격 내에 도달할 수 있는 Velocity 쌍으로 정의되는 Dynamic Window내에서의 Velocity만을 고려한다
- DWA는 아래에 따라 Objective Function을 최대화한다
- Target으로의 Progress
- 장애물으로부터의 Clearance
- 최적의 Velocity 쌍을 생성하기 위한 Forward Velocity
- 절차는 아래와 같다
- 불연속적으로 Robot의 Control Space를 Sampling 함(dx, dy, dtheta)
- Sampling 된 각 Velocity에 대해 Forward Simulation을 통해 Robot의 현재 상태로부터 짧은 시간동안 Sampling 된 Velocity가 적용되면 어떻게 될지를 예측
- Forward Simulation : Local Planner가 Robot의 Control Space 내의 Velocity Sample을 얻은 후 그 Velocity 쌍으로 나타나는 Circular Trajectory를 조사한 후 장애물과 교차하는 Trajctory를 갖는 Velocity를 제거한다
- 각 Velocity Sample은 sim_time(s) Parameter에 의해 조절되는 시간 간격동안 마치 Robot에 적용된 것 처럼 Simulation 된다
- sim_time값이 커질수록 계산 부하가 무거워지며 Local Planner가 생성한 Path가 길어지며 합리적임
- 장애물 / 목표 지점 / Global Path 와의 근접성, 속도 등의 특성을 포함한 Metric을 사용해 Forward Simulation의 결과를 평가(Scoring)하여 장애물과 충돌하는 Path는 버림
- 가장 높은 score를 갖는 Trajectory를 선택하고 관련된 Velocity를 Mobile Base에 전달
- Rinse and Repeat
- 위 절차를 다시 정리하자면 아래와 같다
- Dynamic Window 내에 있는 Velocity Space 내의 Velocity 쌍 (vx, vy, ω) 을 Sampling
- 허용 불가능한 Velocity 제거
- Objective Funtion을 통해 Velocity 쌍을 평가하여 Trajectory Score를 출력
- 최적의 Velocity Option 선택 후 재계산 진행
- 위 과정은 장애물 정보를 제공하는 Local Costmap을 기반으로 진행한다
- 따라서 DWA가 최적의 행동을 하기 위해선 Local Costmap의 Parameter를 알맞게 Tuning하는 것이 매우 중요하다
2. teb_local_planner
- Local Plan 계산을 위해 Timed Elastic Band를 사용하는 Local Planner
3. eband_local_planner
- Local Plan 계산을 위해 Elastic Band Method를 사용하는 Local Planner
- About DWA Parameters
# dwa_local_planner_params.yaml
DWAPlannerROS:
## Robot Configuration Parameters ##
acc_lim_x: 1.0 # X 방향 가속도 제한 (meters/s^2)
acc_lim_y: 0.0 # Y 방향 가속도 제한 (meters/s^2)
acc_lim_theta: 2.0 # 각 가속도 제한 (raduis/s^2)
max_vel_trans: 0.5 # 최대 Translational Velocity의 절대값 (m/s)
min_vel_trans: 0.0 # 최소 Translational Velocity의 절대값 (m/s)
max_vel_x: 0.5 # X 방향 최대 속도 (m/s)
min_vel_x: -0.1 # X 방향 최소 속도 (m/s). 후진이 가능하게 하려면 음수 값을 설정
max_rot_vel: 0.3 # 최대 회전속도의 절대값 (rad/s)
min_rot_vel: 0.0 # 최소 회전속도의 절대값 (rad/s)
max_vel_y: 0.0 # Diffenetial Type Robot의 경우 y 관련 parameter들은 0이어야 함
min_vel_y: 0.0
## Goal Tolerance Parameters for each coordinate ##
xy_goal_tolerance: 0.1 # 목표 자세와 로봇의 실제 자세와의 x, y 위치 오차 (meter)
yaw_goal_tolerance: 0.05 # 목표 자세와 로봇의 실제 자세와의 각도 오차 (rad)
latch_xy_goal_tolerance: false
# 만약 goal_tolerance가 latch되면 로봇이 목표 위치에 도착했을 때 goal tolerance를 벗어났더라도 회전을 함
## Forward Simulation Parameters ##
sim_time: 5.0 # Simulation 계산을 진행할 시간 지정 (second)
sim_granularity: 0.3 # 주어진 궤적의 point 사이의 step size (meter)
vx_samples: 10 # x 속도 공간에서의 Sample 수
vy_samples: 0 # y 속도 공간에서의 Sample 수
vtheta_samples: 20 # theta 속도(각속도) 공간에서의 Sample 수
use_sim_time: true
# Defines the duration of the simulated trajectory. Larger value allow the planner to consider
# longer trajectories. Too low value allows to pass narrow area and too high value not allows
# rapid rotation
controller_frequency: 10.0
penalize_negative_x: true
## Trajectory Scoring Parameters (Trajectory Evalutation) ##
path_distance_bias: 32.0 # Controller가 주어진 경로(Global Plan)에 가깝게 유지하도록 하는 Weight
goal_distance_bias: 24.0 # Controller가 Local Plan에 가깝게 유지하도록 하는 Weight
occdist_scale: 0.02 # Controller가 장애물을 피하도록 하는 가중치
# 위 Parameter들은 Path에 점수를 매길 때 어떤 부분에 더 점수를 줄지 결정
forward_point_distance: 0.5 # 0.0
stop_time_buffer: 10.0 # Additional time buffer added to the planned trajectory to account for stopping. It helps the robot to decelerate
# and come to a complete stop at the goal location
scaling_speed: 0.25 # Speed at which the planner scales the velocities of the sampled trajectories.
# Higher value allows for faster scaling, while lower value makes the scaling more gradual
max_scaling_factor: 0.3 # Maximum scaling factor that can be applied to the velocities of the sampled trajectories
# Smaller value will result in slower maximum velocities
# Oscillation Prevention Parameters
oscillation_reset_dist: 0.05 # Minimum distance that the robot need to travel in order to reset the oscillation detection.
# If the robot`s position change distance samller than this threshshold, it indicates that the robot is osciilatng
# and planner needs to take action to break out of the oscillation
# Debugging
publish_traj_pc : true # Set Trajectory Debugging
publish_cost_grid_pc: true # Set costmap Debugging
holonomic_robot: false- sim_time
- 해당 Parameter의 값이 너무 낮으면 (2.0 이하) Path 계산시 최적의 Path를 계산하기엔 시간이 부족하여 제한된 성능을 보이며 Robot이 좁은 길을 주행하게 함
- DWA 사용시의 모든 Trajectory는 Arc이며, 해당 Parameter의 값이 너무 높으면 (5.0 이상) 매우 유연하지 못한 긴 Curve를 생성함 (높은 성능의 컴퓨터에게는 4.0 정도가 적당?)
- 값이 커질수록 계산 부하가 무거워지며 Local Planner가 생성한 Path가 길어지며 합리적임
- Local Planner는 controller_frequency(Hz) 시간 간격 이후에 Replan을 진행함

- 직접 해보고 위 사진 바꿀 것
- vx_samples, vy_samples, vth_samples
- X, Y 방향에서의 Velocity Sample 수와 Rotational Velocity Sample 수 설정 (vy_samples는 omni wheel에서만 사용)
- Computation Power 환경에 따라 설정 필요
- 직진보다 회전이 더 복잡하므로 vth_sample를 Translational Velocity Sample들 보다 크게 하는 것이 좋다
- sim_granularity
- Trajectory상의 Points간의 Step Size로, Trajectory상의 Point들이 장애물과 만나는지 안만나는지를 얼마나 자주 Examine되어야 하는지를 설정
- 낮을수록 빈도가 높아져 더 많은 Computation Power 필요
- Turtlebot정도 크기의 Mobile Robot에는 기본값인 0.025정도가 적당
- Trajectory Scoring Related Parameters (path_distance_bias, goal_distance_bias, occdist_scale)
- 앞서 설명했듯 DWA Local Planner는 아래의 요소들에 의존하여 Objective Funciton들을 최대화하여 최적의 Velocity 쌍들을 얻는다
- Target으로의 Progress
- 장애물으로부터의 Clearance
- 최적의 Velocity 쌍을 생성하기 위한 Forward Velocity
- ROS에서 Objective Function의 Cost는 아래와 같이 계산된다 (최소의 Cost를 얻는 것이 목표)
- cost = path_distance_bias * (distance(m) to path from the endpoint of the trajectory)
+ goal_distance_bias * (distacne to local goal from the endpoint of the trajectory)
+ occdist_scale * (maximum obstacle cost along the trajectory in obstacle cost (0 ~ 254))- path_distance_bias : Local Planner가 Global Path에 얼마나 가깝게 있을 것인가에 대한 가중치. 클수록 Local Planner가 Global Path를 잘 따라감
- goal_distance_bias : 어떤 Path이던 간에 Robot이 어느정도로 Local Goal에 도달하도록 시도하게 할 것인가에 대한 가중치. 클수록 Robot이 Global Path에 덜 붙음
- occdist_scale : Robot이 어느정도로 장애물을 피하게 할 것인가에 대한 가중치. 클수록 Robot이 제자리에 붙어있게 함
- path_distance_bias : Local Planner가 Global Path에 얼마나 가깝게 있을 것인가에 대한 가중치. 클수록 Local Planner가 Global Path를 잘 따라감
- Goal Distance Tolerance Related Parameters
- xy_goal_tolerance (double, default : 0.10) : 목표 자세와 Robot의 x, y 위치 오차 (meter)
- yaw_goal_tolerance (double, default : 0.05) : 목표 자세와 Robot의 각도 오차 (radians)
- latch_xy_goal_tolerance (bool, default : false) : Goal Tolerance가 Latch되었을 경우 Robot이 목표 X, Y 지점에 도달하면 단순히 자리에서 회전하게 함. 회전으로 인해 Goal Tolerance를 벗어나더라도 진행시킴
- Oscilation Reset Related Parameter
- Robot이 출입구 등을 지나는 상황에서 Local Planner가 정반대 방향의 Path를 생성하여 Robot이 앞뒤로 Oscilate 할 수 있다
- 이러한 현상이 반복되는 경우, Navigation Stack은 Robot이 Recovery Bebavior를 시도하도록 한다
- oscillation_reset_dist (double, default : 0.05) : Oscillation Flag가 Reset되기 위해 Robot이 얼만큼 움직여야 하는지를 설정
- 만약 Robot의 위치 변화가 이 값보다 작다면, Robot이 Oscillating하고 있음을 나타냄
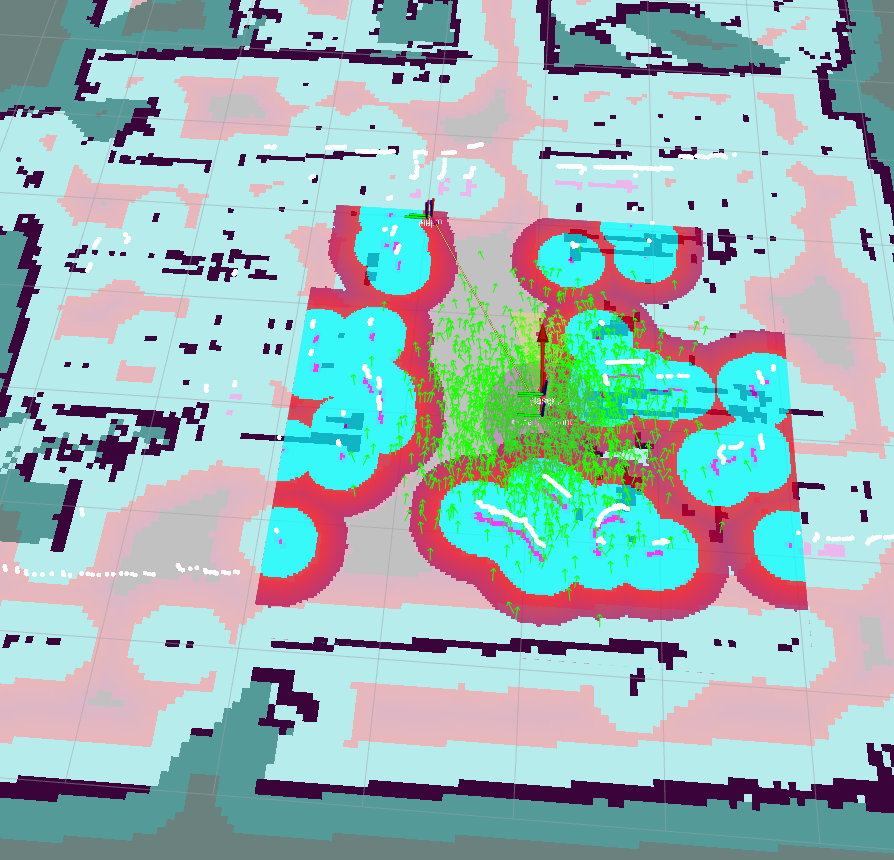
- About Costmap
- ROS에서 costmap은 아래의 3가지 Layer로 구성됨 (자세한 설명은 costmap_common_params.yaml 에서)
- Static Map Layer : Navigation Stack에 제공된 Static SLAM Map을 직접 해석
- Obstacle Map Layer : 2D / 3D 장애물을 포함 (Voxel Layer)
- Inflation Layer : 장애물이 각 2D Costmap Cell의 Cost를 계산하기 위해 Inflate 됨
- Global / Local Costmap
- Global Costmap : Navigation Stack에 제공된 Map상의 장애물을 Inflate 함으로써 생성됨
- Local Costmap : Robot의 Sensor에 실시간으로 감지되는 장애물을 Inflate 함으로써 생성됨
- Resolution
- 계산 부하와 Path Planning에 영향을 미치는 Parameter로, Global / Local Costmap 따로 설정 가능
- 0.05이하의 낮은 Resolution은 좁은 통로에서 장애물 구역이 통로 전체를 감싸 Local Planner가 Path를 생성하지 못함
- Global Costmap의 경우 Navigation Stack에 제공된 Map과 일치하는 Resolution을 사용하는 것이 좋음
- Gmapping 사용시 Laser Scanner의 Resolution이 원하는 Map Resolution보다 낮을 경우 Laser Scanner가 구역을 cover하지 못해 Map에 다수의 작은 'unknown dots'가 생긴다
- 사용중인 Lidar의 Resolution 확인 후 그에 맞게 Global Costmap의 Resolution 설정 필요
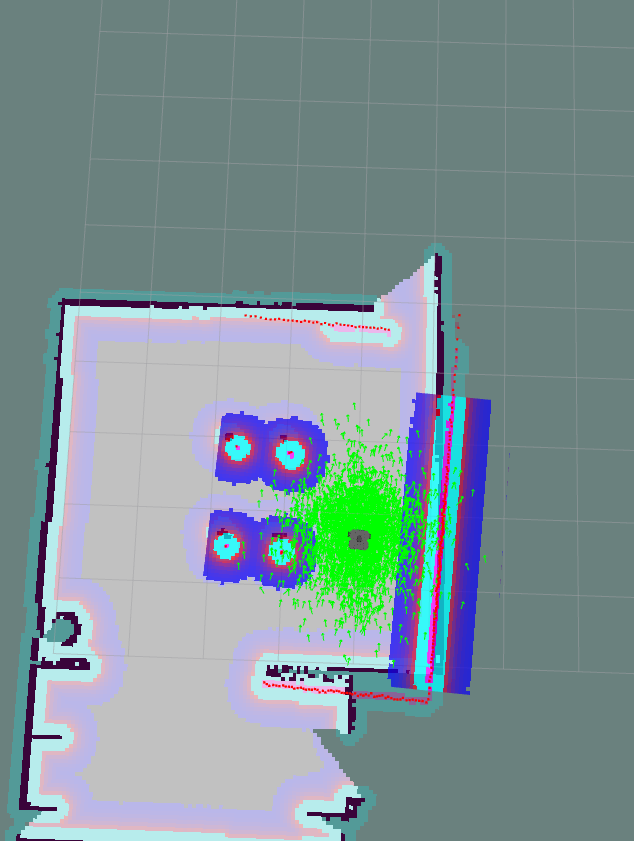
- About Local Costmap
- Local Planner는 Local Plan을 계산하기 위해 Local Costmap을 사용함
- Global Costmap과 달리 Local Costmap은 Robot의 Sensor Data로부터 직접적으로 만들어진다
- 사용자에 의해 정해진 크기의 Costmap의 중앙에 Robot이 있고, Robot이 움직임에 따라 Local Costmap또한 같이 움직이며 실시간으로 장애물에 대한 정보를 얻는다
- 새로운 장애물이 나타나면 해당 물체는 Local Costmap에만 적용된다
local_costmap:
global_frame: odom
robot_base_frame: base_footprint
update_frequency: 10.0
publish_frequency: 10.0
transform_tolerance: 2.0
# Rolling Window Related Parameters
rolling_window: true
resolution: 0.02
width: 4.0
height: 4.0
plugins:
- {name: obstacle_layer, type: "costmap_2d::VoxelLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}- global_frame : Costmap이 작동하는 Global Frame의 이름. Local Costmap에서는 반드시 Odometry Data인 /odom으로 설정해야 함
- rolling_window : Costmap의 rolling window version 사용 여부 결정. Local Costmap에서는 반드시 true로 설정해야 함
- Rolling Window 사용 시 Robot 근처의 일부 환경만을 Costmap에 나타냄
- width, height : Costmap의 가로, 세로 길이 설정
- update_frequency : Map update 주기 설정
- plugins : Global Map의 Plugins와 동일
- costmap_2d::ObstacleLayer : 장애물 회피에 사용
- costmap_2d::InflationLayer : 장애물 inflate에 사용
- local costmap과 global costmap의 obstacle layer는 서로 다른 plugins를 사용함
- local costmap은 costmap_2d::ObstacleLayer를 사용하고 global costmap은 costmap_2d::VoxelLayer를 사용함
- 현재 같은 plugins를 사용중인데, 로봇을 돌려가며 확인해보고 수정 필요
- Local Costmap은 Sensor의 Topic들을 Subscribe하여 아래의 과정을 거쳐 Map을 Update함
- Sensor Data를 읽음
- Marking(Costmap에 장애물의 정보 추가), Clearing(Costmap에서 장애물의 정보를 없앰) 작업 수행여
- Marking, Clearing 작업은 Obstacle Layer에 정의될 수 있음
- 각각의 Cell에 알맞는 Cost값 할당
- 장애물이 있는 각각의 Cell에 대해 Obstacle Inflation 수행. Occupied Cell로부터 정의된 Inflation Raduis만큼 바깥쪽으로 퍼져나감
- costmap_common_params.yaml
footprint: [[-0.2625, 0.2725], [0.2625, 0.2725], [0.2625, -0.2725], [-0.2625, -0.2725]]
transform_tolerance: 2.0
map_type: voxel
obstacle_layer:
enabled: true
max_obstacle_height: 1.113
obstacle_range: 3.0
raytrace_range: 3.2
origin_z: 0.0
z_resolution: 0.2
z_voxels: 10
unknown_threshold: 15
mark_threshold: 0
combination_method: 1
track_unknown_space: true
# origin_z: 0.0
publish_voxel_map: false
observation_sources: laser_scan_sensor
laser_scan_sensor: {sensor_frame: laser, data_type: LaserScan, topic: scan, marking: true, clearing: true}
inflation_layer:
enabled: true
cost_scaling_factor: 20.0
inflation_radius: 0.3
static_layer:
enabled: true- footprint : Mobile Base의 윤곽선을 2D Matrix로 나타낸 것. 로봇에 맞게 장애물을 팽창시키는데 사용되는 내접원과 외접원의 반지름을 계산하기 위해 사용. 안전을 위해 실제 Robot의 윤곽보다 크게 잡는 것이 좋음
- 원형 Robot의 경우 'footprint' 대신 'robot_radius' 사용됨
- Obstacle Layer : Costmap 상의 장애물 Marking을 담당. obstacle / voxel layer 모두 obstacle layer로 같이 불린다
(Obstacle Layer는 2D, Voxel Layer는 3D)
ROS에서는 Obstacle Layer로부터 Voxel Layer가 파생되었으며, 둘은 모두 PointCloud / PointCloud2 Type Message 형태로 보내지는 Laser Scan Data를 해석하여 장애물에 대한 정보를 얻는다
- max_obstacle_height (default : 2.0) : Costmap에 반영될 수 있는 장애물의 최대 높이. Robot보다 조금 크게 정의되어야 함 (meter)
- obstacle range (default : 2.5) : Costmap에 반영될 거리. Robot과 장애물의 거리가 해당 값보다 작을 경우 Costmap에 반영됨. Sensor마다 재정의 가능 (meter)
- raytrace_range (default : 3.0) : Sensor Data를 사용하여 장애물을 ray trace(광선 추적) 하는 거리를 정의. 마찬가지로 Sensor마다 재정의 가능 (meter)
- observation_sources (default : "") : 공간에 의해 분리된 observation source name들의 list. source_name을 통해 아래의 각각의 namespace 정의
- sensor_frame : 해당 Sensor의 Frame
- topic (default : source_name) : 해당 Sensor의 Topic. 기본값은 Source의 이름
- data_type (default : PointCloud) : 위 Topic에 관련된 Data Type. 'PointCloud', 'PointCloud2', 'LaserScan' 사용 가능
- clearing (default : false) : 해당 관측값이 Free Space를 Clear 하는데 사용될지 여부를 결정
- marking (default : true) : 해당 관측값이 장애물을 Mark 하는데 사용될지 여부를 결정
- inf_is_valid (default : false) : "LaserScan" Data Message에서 Inf 값을 받을지 결정. Inf값은 Laser Sensor가 측정할 수 있는 최대값으로 변환됨
- Inflation Layer : 장애물의 각 Cell의 Inflation에 대한 Setting
- inflation_radius (default : 0.55) : 장애물의 Cost값을 팽창시킬 반지름 크기를 설정 (meter)
- cost_scaling_factor (default : 10.0) : 팽창시키는 동안 적용할 Scaling Factor. 아래 그림의 지수함수적으로 감소하는 Cell Cost의 지수함수의 감소 비율을 설정
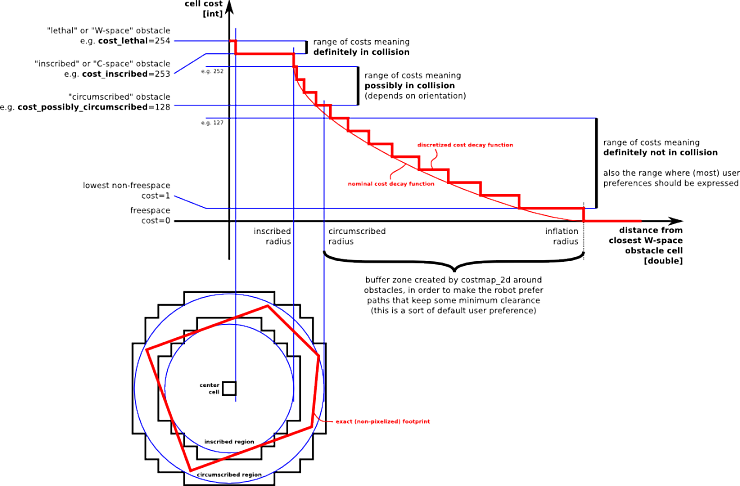
- Inflation radius가 통로를 거의 다 덮고, cost scaling factor를 조정하여 아래 curve의 기울기를 원만하게 해 Robot이 장애물에서 최대한 멀리 떨어지게 하는 것이 좋음

- 왼쪽 : inflation_radius : 0.55, cost_scaling_factor : 5.0
- 오른쪽 : inflation_radius : 1.75, cost_scaling_factor : 2.58

- 왼쪽 : inflation_radius : 0.1, cost_scaling_factor : 1.5
- 오른쪽 : inflation_radius : 0.5, cost_scaling_factor : 1.5
- 같은 cost_scaling_factor에서 inflation_radius가 커질 경우 장애물의 Cost값이 커져 로봇이 움직일 수 있는 공간이 줄어들어 최적화된 Path를 찾기 어려워진다


- 왼쪽 : inflation_radius : 1.0, cost_scaling_factor : 2.0
- 오른쪽 : inflation_radius : 1.0, cost_scaling_factor : 20.0
- 같은 inflation_radius에서 cost_scaling_factor가 작아질 경우 로봇이 움직일 수 있는 공간이 줄어들어 최적화된 Path를 찾기 어려워진다
- Static Layer : Global Costmap에게 Static Map 제공
- map_topic (string, default : map) : Costmap이 해당 Topic의 Static Map Data를 Subscribe
- Recovery Behaviors
- Robot이 Path를 따라가는 도중 어떤 이유로 인해 주행이 막혔을 경우 ROS에서 막힌 상황을 풀어주고 다시 Navigation을 진행하도록 Recovery Behavior를 수행
- Navigation Stack에 내제되어있는 기능
- ROS Navigation Stack은 clear_costmap_recovery와 rotate_recovery라는 2가지 Recovery Behavior를 제공
- clear_costmap_recovery : Local Costmap을 Global Costmap과 같은 상태로 되돌림
- rotate_recovery : 현재 공간에서 360도 회전을 통해 Recover 진행. 회전 실패로 진행하지 못할 수도 있으며 이 경우 Robot이 Recovery Behavior를 포기할 수도 있음 -> 로봇이 멈출 위험성이 높아짐
- SMACH 사용을 통해 극복 가능? (Robot과 가까운 임시 Goal 설정, 전에 갔었던 Pose로 되돌아 가기 등 사용)
- 이를 사용하기 위해선 move_base_params.yaml에서 아래의 Parameter를 활성화해야 함
- recovery_behavior_enabled (defalut : true) : Recovery Behavior의 활성화 여부를 결정
- Rotate Recovery : Robot이 360도로 회전하여 공간을 Clear 하는 것. 관련 Parameter는 아래와 같다
- /sim_granularity (double, default : 0.017) : Robot이 회전할 때, 해당 각도 이내에 장애물이 있는지 확인하여 현재 환경이 안전한지 확인. Radian 단위이며, 기본값은 1도
- /frequency (double, default : 20.0) : move_base node로 보내는 Velocity Command의 Frequency (hertz)
- Clear Costmap : Robot의 특정 지역 바깥쪽에 있는 장애물을 모두 Clear함. Local Costmap은 Global costmap과 비슷하게 생겨야 함.
- move_base node는 '/move_base/clear_costmaps' Service를 통해 Costmap을 Clear함함

- /move_base/clear_costmaps Service 호출 전(왼쪽) / 후(오른쪽)
- 해당 Service는 아래의 명령어를 통해 호출할 수 있다
$ rosservice call /move_base/clear_costmaps "{}"
- Oscillation Suppersion
- Osciilation은 x, y, theta 중 하나가 음수와 양수의 값이 연속해서 나올 때 발생함
- 이를 방지하기 위해 Robot이 어떤 방향으로 움직일 때 반대쪽 방향은 다음 cycle에서 갈 수 없는 방향이라 표시한 후 Robot이 그 Flag가 설정된 위치에서 어느정도의 거리를 움직이기 전까지는 그 쪽으로 못가게 함
- 관련된 move_base의 Parameter는 아래와 같다
- oscillation_timeout (double, default : 0.0) : Recovery Behavior가 실행되기 전 Oscillation을 몇초간 허용할지를 설정. 값이 0.0일 경우 무한대로 대기하여 Recovery Behavior가 발생하지 않음
- oscillation_distance (double, default : 0.5) : Oscillating이 아니라고 판단하기 위해 Robot이 몇 미터정도를 움직여야 하는지 설정. 이 값보다 멀리 움직이는 경우 oscillation_timeout값을 초기화하여 다시 셈
- Dynamic Reconfigure
- 위의 Parameter 값들을 File에서 직접 수정하는 것이 아닌, rqt_reconfigure를 사용하여 실시간으로 조절하며 변경 결과를 확인할 수 있음
- 아래의 명령어를 통해 진행할 수 있다
$ rosrun rqt_reconfigure rqt_reconfigure
참고 자료 :
https://kaiyuzheng.me/documents/navguide.pdf
https://soohwan-justin.tistory.com/39
move_base - ROS Wiki
melodic noetic Show EOL distros: EOL distros: electric fuerte groovy hydro indigo jade kinetic lunar diamondback: Only showing information from the released package extracted on Unknown. No API documentation available. Please see this page for in
wiki.ros.org
navfn - ROS Wiki
melodic noetic Show EOL distros: EOL distros: electric fuerte groovy hydro indigo jade kinetic lunar diamondback: Only showing information from the released package extracted on Unknown. No API documentation available. Please see this page for in
wiki.ros.org
amcl - ROS Wiki
melodic noetic Show EOL distros: EOL distros: electric fuerte groovy hydro indigo jade kinetic lunar diamondback: Only showing information from the released package extracted on Unknown. No API documentation available. Please see this page for in
wiki.ros.org
http://wiki.ros.org/costmap_2d
costmap_2d - ROS Wiki
Costmap2DROS The costmap_2d::Costmap2DROS object is a wrapper for a costmap_2d::Costmap2D object that exposes its functionality as a C++ ROS Wrapper. It operates within a ROS namespace (assumed to be name from here on) specified on initialization. Example
wiki.ros.org
'Study_ROS' 카테고리의 다른 글
| About AMCL (Adpative Monte Carlo Localiztion) (0) | 2023.10.25 |
|---|---|
| Cartographer/Hector SLAM 사용법 (0) | 2023.02.05 |
| Ubuntu 20.04에 ROS Noetic 설치법 (0) | 2023.01.21 |
| [ROS] tf란? (0) | 2022.11.06 |
| 우분투에서 Arduino IDE를 통한 rosserial 사용법 (0) | 2022.11.05 |



