- 프로젝트 목표 : 실내 자율주행 배액 수거 로봇 개발
- 수행 기간 : 2022.08 ~ 2023.11.30
- 참여인원 : 3명
- SW 개발 1, HW 개발 1, Server 개발 1
- 주요 성과
- 2022.05 ~ 10 : 정부 지원사업 선정 (세종테크노파크 지역 과학문화 역량 강화 사업 '우리동네 과학클럽')
- 2022.09 ~ 2023.01 : 교내 창업동아리 선정
- 2022.11.24 : 교내 학술제 우수상 수상
- 2023.03 : 디바이스마트 ICT 융합 프로젝트 공모전 장려상 수상
- 2023.11 : 한이음 ICT 멘토링 공모전 동상 수상
- 2023.11 : 교내 학술제 우수상 수상
- 작품 개요
- 고령화 현상으로 인한 고령 요양자 및 환자 증가, 의료/간병 인력 부족 현상을 해결
- 기존에 간병인이 맡았던 배액 관련 업무를 대체하여 의료, 간병 간의 부담 감소 목표
- 작품 소개
- 한이음 2차 평가 제출 영상
1) 전체 System 구성
- OS : Ubuntu 20.04
- Controller Board : Intel NUC 11 Essential Kit

2) Hardware 구성
1. 전체 Hardware



- 전체 크기 : 540mm x 550mm x 1130mm
- 무게 : 60kg
- PVC 열 가공을 통한 하단 구동부 케이스 제작
- 2T 알루미늄 플레이트 절곡을 통한 상단부 케이스 제작
2. 구동부


- 15T 알루미늄 판 주문 제작을 통한 구동부 몸체 구성

- 브라켓을 통한 모터와 감속기 장착

- 브라켓은 프레임과의 연결부를 Slot 처리하여 벨트의 텐션을 조정 가능하도록 함

- 로봇의 큰 하중을 안정적으로 지지하기 위해 구동부 하단에 베어링 하우징을 통해 구동 축 장착
- 프레임 상단의 모터 축과 하단 구동 휠에 풀리 부착 후 벨트를 이용해 동력 전달

- 유사시 로봇의 즉각적인 정지를 위한 비상정지 스위치 배치
- 스위치를 누를 경우 모터 드라이버로의 전원 공급이 중단되어 모터의 작동이 정지
3. 접속부

- 병실 내부에 환자의 배액을 보관할 컨테이너 설치

- 병실 내부의 컨테이너와 배액 수거 구조물 양단에 SP 커플러를 배치하여 수동으로 접속이 가능하게 함
- 접속 시 병실 내부의 배액 컨테이너 속의 배액이 호스를 타고 로봇 내부의 배액 컨테이너로 이동하게 설계

4. 폐기부

- 2개의 수위 센서를 통한 배액량 모니터링
- 배액량에 따라 LED의 색깔이 변하게 하여 완충 여부를 알 수 있게 함


- 폐기 위치 도착 후 2DOF를 갖는 로봇 팔을 배출하고 로봇 내 배액 컨테이너 내부의 펌프를 Relay를 통해 제어하여 배액을 밖으로 배출

- 로봇 내부 프로파일에 Arduino 및 각 센서 배치
5. 전원 공급도

- 24V LiFePo4, 12V 18650 배터리와 DC-DC Converter, Relay를 통해 각 부품에 전원 공급
3) Software 구성
- 전체 Source Code : https://github.com/YoungSeong98/Project_KUSMO
GitHub - YoungSeong98/Project_KUSMO
Contribute to YoungSeong98/Project_KUSMO development by creating an account on GitHub.
github.com
1. 전체 Flow Chart

- 충전 구역에서 대기 중 호출이 들어오면 해당 병실로 자율주행을 통해 이동
- 도착 후 접속부 수동 연결을 통해 배액 컨테이너에 접속하여 배액 수거
- 수거 완료 후 다시 자율주행을 통해 대기 위치로 복귀
- 수위 센서를 통해 로봇 내의 배액량 모니터링 후 완충 시 폐기 구역으로 이동하여 배액 폐기
2. ROS 관련
- ROS Noetic 사용
2-1. 자율주행 관련
1) TF (Transformation)
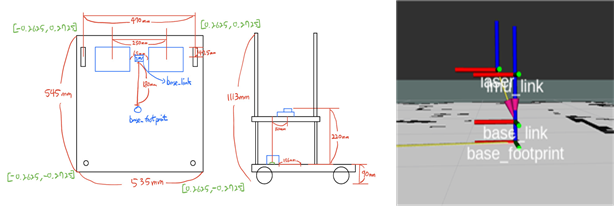
- 로봇의 실제 Sensor 간의 거리 측정 후 해당 값에 맟게 TF 설정
2) SLAM
- Hector SLAM을 통한 Mapping 진행

3) Global / Local Planner
- Global Planner : Navfn
- Local Planner : DWA (Dynamic Window Approach)

4) Localization
- AMCL (Adaptive Monte Carlo Localization) 사용

4) 사용 부품 목록
- 전체 부품 및 가격 리스트
- Intel NUC 11 Essential Kit : 로봇의 Main PC 역할
https://www.devicemart.co.kr/goods/view?no=14566494
산업용 PC Intel® NUC 11 Essential Kit [NUC11ATKC2]
[국내 대리점 정품] Intel® NUC Kit with Intel® Celeron® Processors
www.devicemart.co.kr
- RPLidar A1 : Lidar 센서
https://www.devicemart.co.kr/goods/view?no=1149202
슬램텍 RPLIDAR A1M8-R6 360도 거리측정 라이다 센서 - 12m
한국공식대리점 / 2D 레이저 스캐너로 360도에 12미터 이내 범위를 스캔 / Distance Resolution :<0.5mm,<1% of the distance (All distance range) / Scan Rate : 5.5Hz / 170g
www.devicemart.co.kr
- iAHRS (RB-SDA-v1) : IMU 센서
https://www.devicemart.co.kr/goods/view?no=13900391
IntelliThings iAHRS (RB-SDA-v1)
iAHRS센서는 주행 및 이동, 비행체 등의 자세 각도를 측정하고, 모션 정보를 검출하기 위한 관성항법장치입니다.
www.devicemart.co.kr
- MD200T : 모터 드라이버
https://www.mdrobot.co.kr/BLDCMotordriverDCstore/?idx=160
MD200T / DC12V~48V, 10A x 2ch, 200W : 엠디로봇 | 맞춤형 로봇플랫폼, BLDC모터, 모터드라이버, 제어시스템
제품 소개직류전원으로 동작하는 BLDC/DC 모터드라이버입니다.고정밀 서보기능과 속도, 위치, 토크의 정교함으로 모바일로봇 및 자동화기기 등 다양한 분야에 폭넓게 사용됩니다.제어 세분화 :
www.mdrobot.co.kr
- BL9N2G30E0200 : BLDC 모터
https://www.mdrobot.co.kr/BLDCMotorDCstore/?idx=220
BL9N Series 강력한 고성능 BLDC모터 (24VDC, 3000RPM, 200W)
제품 소개BLDC 모터는 엠디로봇과 세계적인 모터기업 M사의 협업으로 국내환경에 최적화되도록 개발되었습니다. 모바일로봇 및 고도의 제어성이 요구되는 첨단 자동화기기에 사용되며 엔코더와
www.mdrobot.co.kr
- HX19-B6 : 비상 정지 스위치
https://www.devicemart.co.kr/goods/view?no=1325061
메탈 비상 정지 푸쉬락 스위치 [HX19-B6]
푸쉬락(PUSH ROCK) 스위치 / 색상: NO LED(비조광) / 정격 전류 : 5A / 정격전압-AC : 250 VAC / 재질 : METAL RED / 홀가공 : 19mm / 캡직경 : 25mm / 한번 누르면 노브가 잠기고 / 노브를 회전시켜 주면 풀리는 제품
www.devicemart.co.kr
- Arduino Mega : 폐기부, 펌프, 수위 센서 및 LED 제어 (2개)
https://www.devicemart.co.kr/goods/view?no=10918650
아두이노 메가 2560 R3 호환 보드 CH340 [SZH-EK375]
ATmega2560 마이크로 컨트롤러 보드 / Operating Voltage : 5V / Input Voltage (recommended) : 7V ~ 12V / Size: 100 x 53mm
www.devicemart.co.kr
- DC 12V Linear Actuator : 폐기부 중 Y축 Linear Actuator
https://www.devicemart.co.kr/goods/view?no=15009701
DC 12V/24V 리니어 엑츄에이터 300mm(행정거리)
행정거리 : 300mm(행정거리) / DC 12V, 24V / 정격 출력 : 20W ~ 최대 30W
www.devicemart.co.kr
- Linear Rail Slide CNC Actuator : 폐기부 중 Z축 Linear Actuator
500 리니어레일 슬라이드 CNC엑추에이터 아두이노
앗! 화면폭이 너무 좁아요. 브라우져의 사이즈를 더 늘여주세요~ 좁은 화면으로 보실 때는 모바일 기기에서 최적화된 화면으로 쇼핑을 즐기실 수 있어요~
scipia.com
- L298N : Y축 Actuator 제어용 모터 드라이버
https://www.devicemart.co.kr/goods/view?no=1278835
2A L298 모터드라이버 모듈 (아두이노 호환) [SZH-EK001]
ST사의 고전압 고전류 모터 드라이버 칩인 L298N을 탑재한 Dual H-Bridge 모터 드라이버 / 작동 전압 : 5V-35V / 전류 : 2A(MAX single bridge)
www.devicemart.co.kr
- CNC Shield : Z축 Actuator 제어를 위한 Arduino Shield
https://www.devicemart.co.kr/goods/view?no=1361492
아두이노 GBRL 호환 CNC 쉴드 [SZH-ET004]
무거운 전장을 대신해서 아두이노와 쉴드만으로 손쉽게 CNC나 각인기의 회로를 대체할 수 있습니다.
www.devicemart.co.kr
- A4988 : Z축 Actuator 제어용 모터 드라이버
https://www.devicemart.co.kr/goods/view?no=1327610
A4988 스텝 모터 드라이버 모듈 레드 RED (방열판 포함)
A4988 Stepper Motor Driver / 방열판 포함 / Voltage: 3V - 5.5V / Size: 21mm x 11mm
www.devicemart.co.kr
- SEN0204 : 배액량 모니터링을 위한 비접촉식 수위 센서
https://www.devicemart.co.kr/goods/view?no=1320952
무접점 수위 센서 모듈 [SEN0204]
본 센서는 매우 민감하고 안정적이며 유해 물질이나 높은 압력에 강한 제품 입니다. 출력 전류는 최대 100mA 입니다.
www.devicemart.co.kr
- JBL-B02 : 배액 배출용 펌프
https://www.devicemart.co.kr/goods/view?no=1232489
JBL-B02
브러시리스 DC펌프모터 -작동범위:9~14V -정격전류:0.45A -최대압력:2M -전력:5.5w / BLDC펌프모터
www.devicemart.co.kr
- DMBP-LF128-4S4P-B20 : 전원 공급을 위한 12.8V 리튬 인산철 배터리팩 (2개)
https://www.devicemart.co.kr/goods/view?no=10827077
12.8V 13,200mAh 리튬인산철(LiFePO4) 배터리팩 - 20A BMS [DMBP-LF128-4S4P-B20]
제조사 : 파워크래프트 / 셀 규격 : ANR26650 / 셀연결방식 : 4S4P / 내부 셀 갯수 : 16개 / 전압 : 12.8V / 용량 : 13200mAh / 소재 LiFePo4 / 출력단자 : 피복전선, XT-60A(옵션) / 특징 : 20A BMS
www.devicemart.co.kr
- XL4016E1 : NUC으로의 19V 전원 공급을 위한 DC - DC Converter
https://www.devicemart.co.kr/goods/view?no=1362015
XL4016E1 DC-DC 스텝 다운 레귤레이터 모듈 [SZH-CH029]
외장형 / 가변출력전압 / 가변방식 : 트리머 / 1ch 출력 / 강하형 125W 비절연 스위칭 컨버터 / 입력전압 : 4V~40V / 출력전압 : 1.25V~36V / 출력전류 : 5A / 변환효율 : 최대 94% / 스위칭 주파수 : 180kHz / 입력
www.devicemart.co.kr
- 95mm 두랄루민 컵스턴 주행 로봇 휠 바퀴 홀8mm
https://item.gmarket.co.kr/Item?goodscode=2177343155
G마켓-95mm두랄루민 컵스턴 주행 로봇 휠 바...
6,700원
item.gmarket.co.kr
- 베어링 하우징
경제형 베어링홀더세트 T형 경량 컴팩트타입[미스미 (MISUMI)] | 한국미스미
한국미스미 FA표준품, CAD도면가공, 무료배송, 신규고객 할인
kr.misumi-ec.com
- 그 외 구동부 구성을 위한 15T 알루미늄 판과 내부 골격 형성을 위한 프로파일, 하단부 케이스를 위한 PVC, 상단부 케이스 제작을 위한 2T 알루미늄 판 사용
'Project > KUSMO' 카테고리의 다른 글
| [KUSMO] 11/9 중간 요약 2 (0) | 2023.11.10 |
|---|---|
| [KUSMO] 10/27 Arduino 기반 폐기부 및 배액량 모니터링 (0) | 2023.10.27 |
| [KUSMO] 10/20 ~ 21 (1) | 2023.10.24 |
| [KUSMO] 10/12 NUC에서 USB Camera를 통한 Aruco Marker 인식 (0) | 2023.10.12 |
| [KUSMO] 10/3 (0) | 2023.10.04 |



